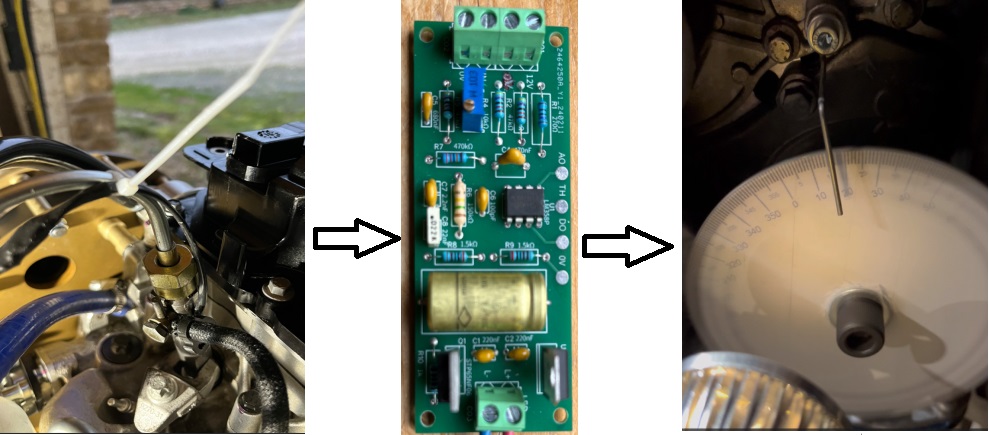
Lors de la mise au point moteur, j’ai rencontré des difficultés pour monter en puissance. Après avoir tenté d’instrumenter le piston du correcteur d’avance avec un montage qui a abimé ma pompe, j’ai réalisé un montage permettant de vérifier l’avance à l’injecteur suivant le même principe que les lampes stroboscopiques utilisées pour caler les allumages des moteurs à essence.
Le système repose sur l’utilisation d’un injecteur pilote qui possède un capteur permettant de détecter les mouvements de l’aiguille de l’injecteur (donc l’instant exact de l’injection), associé à un circuit électronique pilotant une LED haute puissance et à un disque gradué placé sur l’arbre moteur.
Injecteur pilote :
L’injecteur pilote est un modèle Rover du même type que les autres injecteurs mais il est plus long. Il faut donc adapter une des conduites d’injections. Personnellement je l’ai placé sur le cylindre numéro 1.
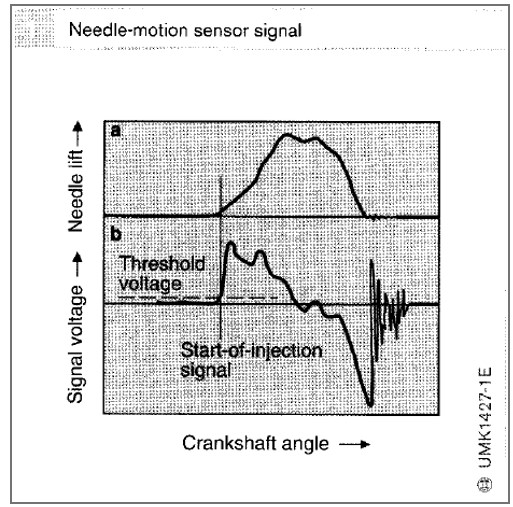
Cet injecteur possède un capteur 2 fils (bobine de 100 ohms environ) qui doit être alimentée avec un courant de 30 mA. Ce courant induit un champ magnétique. Quand la tige d’injecteur bouge cela provoque une variation de réluctance qui fait varier le champ magnétique. La variation de champ induit une variation de potentiel aux bornes de la bobine.
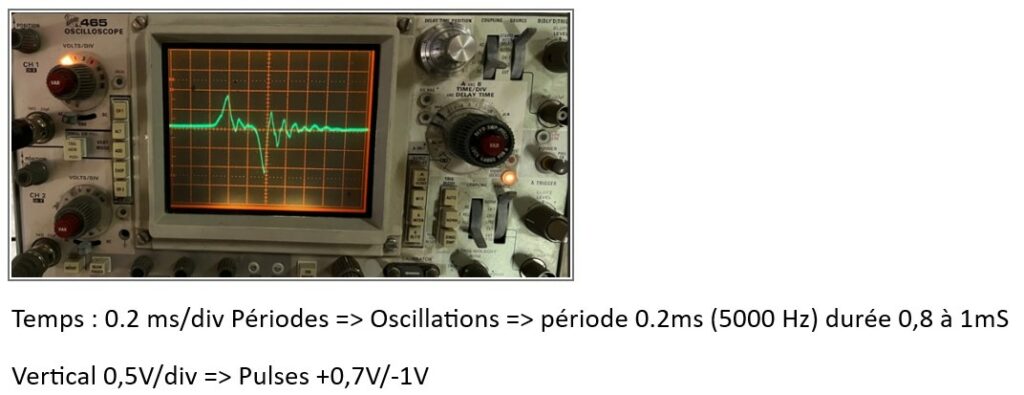
Evolution de la tension aux borne du capteur
J’ai monté cet injecteur et fait des mesures à l’aide d’un oscilloscope pour vérifier le niveau de la tension délivrée. On voit un pulse d’environ 0,7V lors de l’injection.
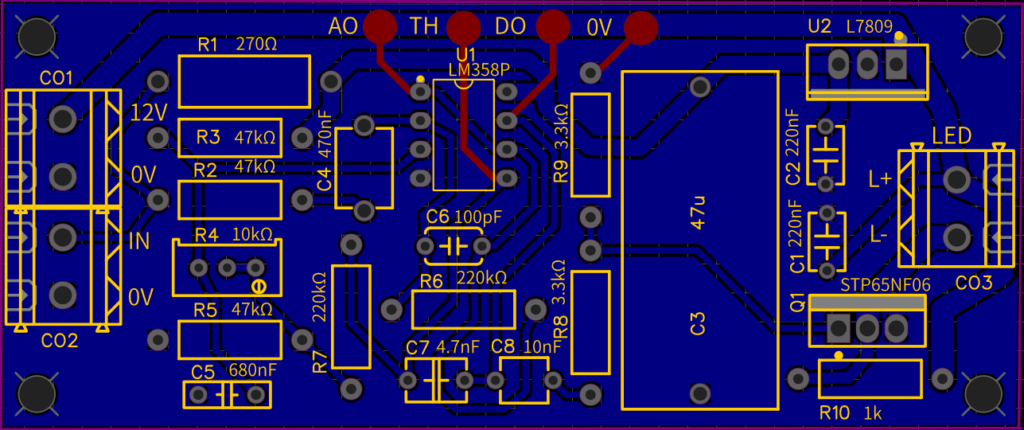
Schéma de commande :
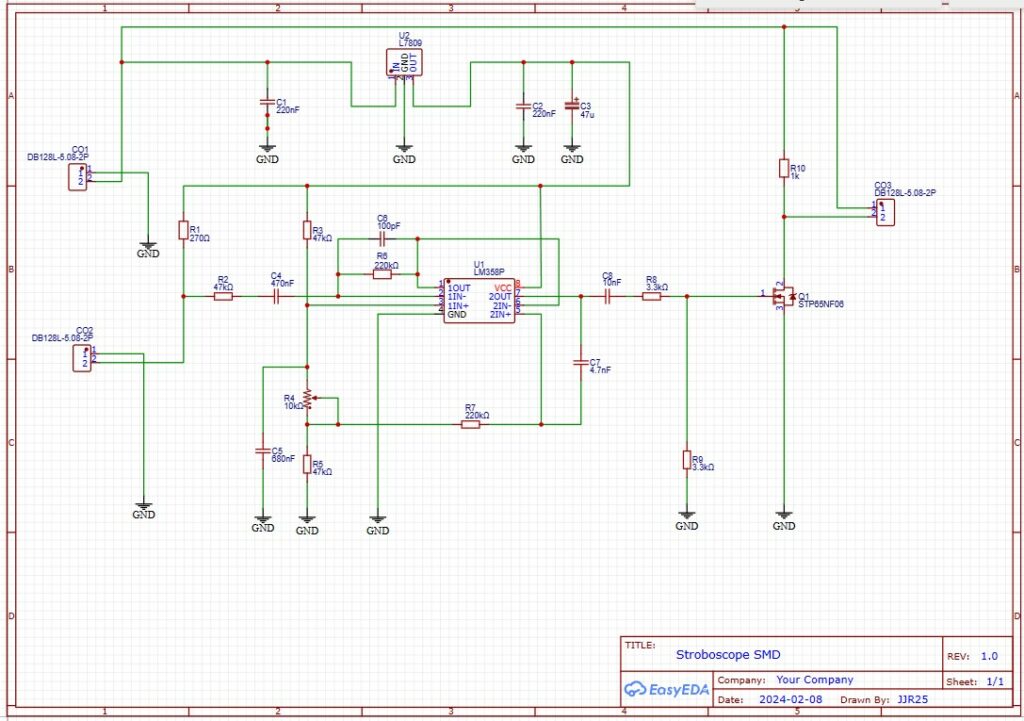
J’ai réalisé un circuit simple basé sur 2 amplis opérationnels permettant de détecter la variation du signal et de générer un pulse lumineux d’environ 50 uSec grâce à une LED.
Fonctionnement
La tension 12 V (connecteur C01) est stabilisée par un régulateur 9V (7809)
Le capteur (connecteur C02)est alimenté au travers de la résistance R1 (270 ohmscourant 30mA)
Le signal est transmis au premier ampli Op par R2/C4 (gain 4)
R6/C6 constitue un filtre pass bas pour rejeter les parasites HF
Le 2ieme ampli Op fonctionne en mode trigger avec réglage du seuil par le potentiomètre R4
C7 R7 provoque un masquage du trigger pendant un certain laps de temps pour éviter des détections multiples (seule la première variation du signal est significative)
C6/R8 transmettent un pulse de 50uSec à l’IGBT Q1 pour piloter la LED du stroboscope(connecteur C03)
La résistance R10 de 1K permet de faire fonctionner le montage sans LED (par exemple si on veut acquérir le signal avec un arduino ou autre système)
Circuit Prototype
Un prototype est d’abord réalisé sur une plaque à trous. La LED est constituée d’une lampe 220v bricolée pour être pilotée en 12V
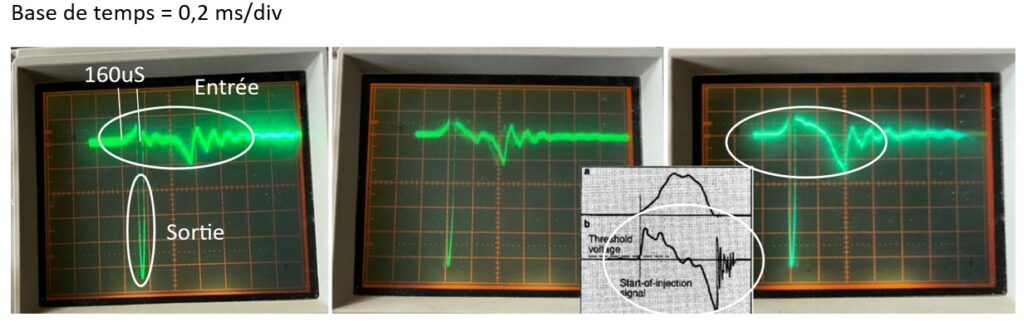
Des tests à différentes vitesses moteur montrent que le système génère les pulses lumineux de 50 uSec avec un délai de moins de 180 uSec (en réglant plus précisément le seuil j’arrive à un délai de 100 uSec soit une précision de 1,2 ° d’angle moteur à 2000 rpm (2,4 ° à 4000 rpm)
Ci dessus tests a différents régimes (moteur a vide) : les signaux d’entrée et de sortie du montage ont été additionnés dans l’oscilloscope pour faciliter les mesures. On voit que quand le régime moteur augmente, le profil du signal se rapproche du profil théorique (plus de carburant injecté).
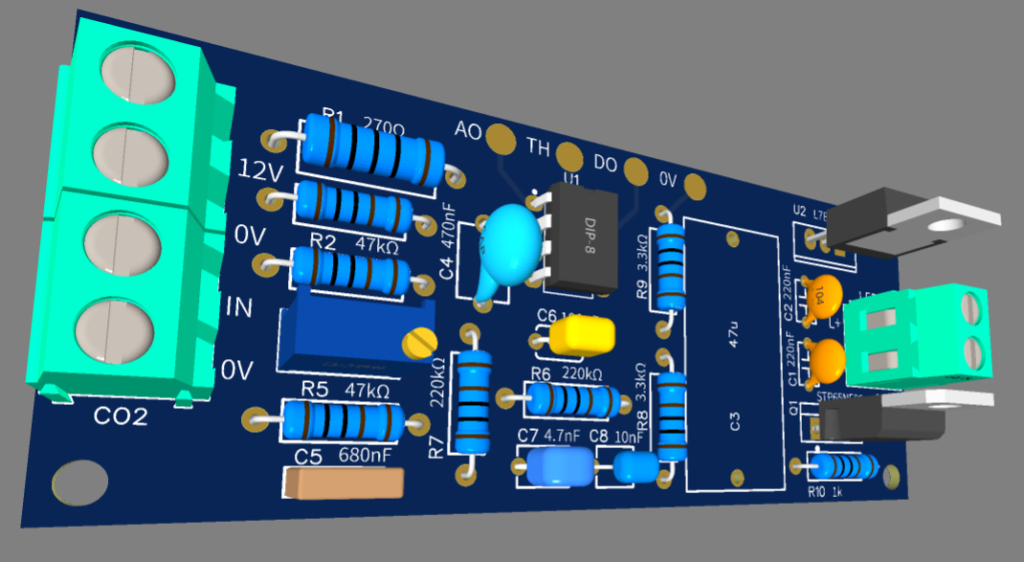
Réalisation
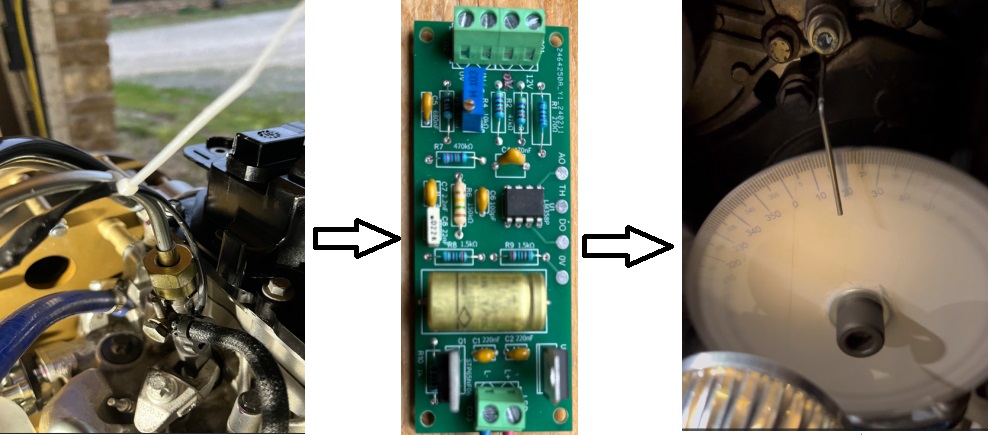
J’ai réalisé 5 circuits imprimés par la société JLCPCB à l’aide de leur logiciel de conception en ligne easyEDA. (Outil performant et simple permettant de concevoir, de chiffrer et commander des circuits nus ou montés). J’ai choisi de réaliser les PCB avec des composants traversants (la réalisation complète par JLCPCB nécessite d’utiliser des composants montés en surface, en cas de problème c’est compliqué à modifier)
Les points de test AO/TH/DO/0V permettent de vérifier le réglage du système (AO sortie premier ampli, DO sortie trigger, TH seuil de détection)Vue 3D du circuit
Grâce à l’offre de bienvenue du site les circuits imprimés sont livrés en 3 semaines pour un prix imbattable. (1 Euros pièce)
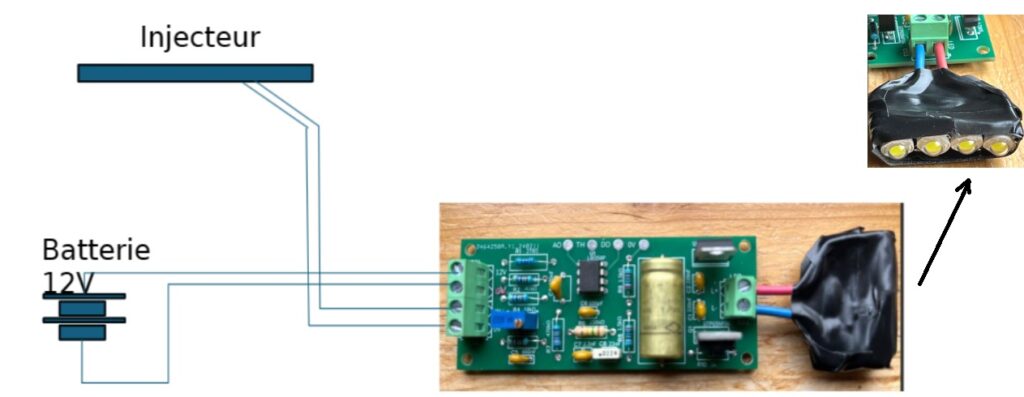
Produit Final
Le produit assemblé, j’ai utilisé au final 4 LED 1 W en série pour la lampe (J’avais essayé avec une LED haute puissance 10W / 12V mais ca ne fonctionnait pas bien car il doit y avoir un circuit de protection interne qui limite la vitesse de montée du courant)
Câblage du module pour utilisation
Test de l’avance
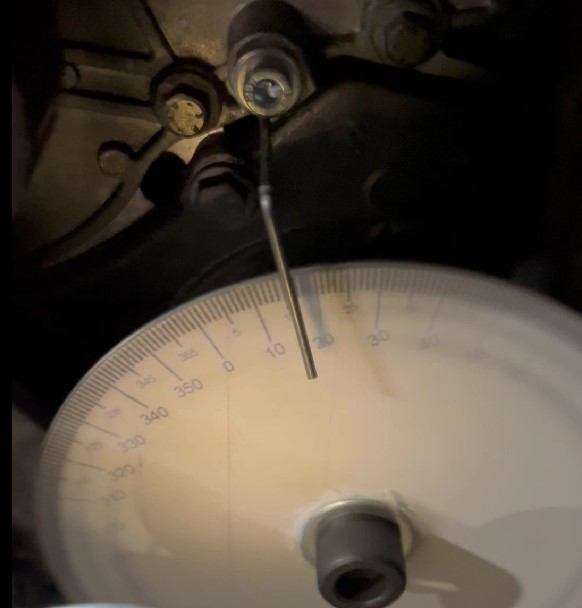
La lecture de l’avance se fait sur un disque gradué fixé sur la poulie de distribution moteur et calé à 0° au point mort haut.
Ce système marche bien m’a permis de vérifier le bon fonctionnement de ma pompe.
Conclusion
Si on établit un référentiel avec un moteur performant, cela permet de régler directement les moteurs futurs avec un minimum d’essais et ceci indépendamment du type de pompe puisqu’on s’intéresse uniquement à l’instant d’injection.
Avantage :
Plus besoin de tourner autour du point de réglage en charge. Après le premier démarrage réussi, il suffit de faire un réglage d’avance à vide à moyen régime puis de vérifier le bon fonctionnement sur toute la plage de vitesse. Les essais en charge ne nécessitent alors que l’ajustement de la vis de richesse pleine charge.
Inconvénient:
Il faut un injecteur pilote et un tuyau d’injecteur modifié (si les utilisateurs se prêtent le matériel cela facilitera la mise en œuvre)
Les tests sont effectués d’abord à vide sans réducteur, puis à vide avec réducteur, puis en charge avec le barreau de test. J’ai rencontré beaucoup de problèmes lors de la mise au point (j’ai eu la poisse) mais cela m’a permis de bien progresser dans la compréhension du système. Je présente ci-dessous les problèmes rencontrés (retour d’expérience), puis les tests en considérant que les problèmes sont résolus (Dans la pratique il y a eu plusieurs cycles de tests à vide et en charge pour solutionner les problèmes listés)
Résumé des problèmes rencontrés
Difficultés au démarrage. Ca démarre et ça tourne, puis plus tard grosses difficultés pour redémarrer. Cause: présence de prises d’air dans le circuit gasoil notamment dues à la poire utilisée pour amorcer. Solution : Pour les tests, mettre des tuyaux transparents sur les circuits d’alimentation et retour gasoil pour bien vérifier que le circuit s’établit correctement, ôter la poire d’amorçage dès que possible.
Fuite de liquide de refroidissementau niveau du bouchon du vase d’expansion. Ce point a été difficile à comprendre car cela ne se provoquait qu’en charge. J’ai eu peur d’un problème d’étanchéité moteur. En fait, le bouchon du vase ne tenait pas la pression. Quand la pression n’est pas correctement contenue, lors l’échauffement du bloc moteur, les bulles de gaz se dilatent et poussent le liquide dans le vase d’expansion qui fuit alors par le bouchon. Solution : Remplacement du vase et bouchon. (voir chapitre intercooler et refroidissement)
Déboitement de la durite silicone de liquide de refroidissement coté pompe à eau. Cause: Embout de connexion en alu coté pompe non compatible avec la durite en silicone utilisée. Solution: Remplacement par un ensemble soudé en cuivre (voir chapitre intercooler et refroidissement)
Déboitement de la durite silicone d’admission d’air coté culasse. Cause: Embout de connexion en alu pas compatible avec la durite en silicone utilisée. Solution: Ré usinage de l’embout pour présenter un renflement suffisant avant le collier de serrage.
Reflux d’huile au travers du piège à vapeur d’huile à haute vitesse. Cause, je n’avais pas mis la plaque antiéclaboussures entre l’arbre à came et le piège à huile . Solution : Mise en place de la plaque. (en attendant la mise en place, les tests sont faits avec le cache culbuteur d’origine)
Blocage du roulement arrière réducteur arbre moteur. Après avoir obtenu la puissance désirée (environ 20 heures de test en rotation) j’ai démonté mon réducteur afin d’extraire mon piège à huile pour en réduire la longueur ( je n’avais pas assez d’espace entre le bout de l’arbre à came et le piège à huile pour mettre en pace la plaque antiéclaboussures). Après démontage, je vois que le roulement arrière réducteur (entre poulie la basse et le flector) présente un jeu important. J’ai passé l’arbre au four pour défretter la poulie. En fait c’est le roulement qui s’est bloqué, la bague interne a tourné sur l’arbre et a rongé celui-ci : l’arbre est mort (24,8 mm de diamètre au niveau du roulement au lieu de 25). La cage du roulement en matériaux synthétique s’est désagrégée et a bloqué le roulement. Cause probable: Roulementdéfectueux (marque Craft). Solution remplacer l’arbre et les roulements (Je prends du SKF avec cage métal et joints caoutchouc)
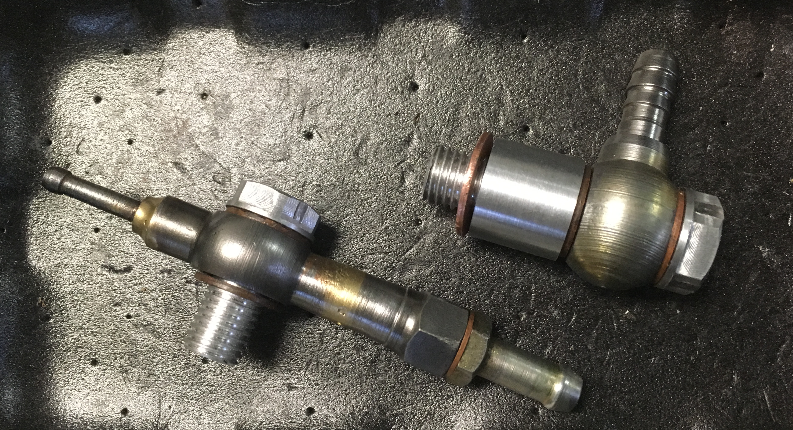
Dégradation de la surface du piston de correction d’avance de la pompe à injection. Lors des tests, comme je n’arrivais pas à monter à une puissance suffisante, j’ai instrumenté la pompe: perçage d’un trou fileté avant l’orifice calibré de sortie pour mettre un capteur de pression + mise en place d’un indicateur de position du piston d’avance (tige + ressort dans un tube vissé sur la plaque de fermeture). Lors d’une vérification je vois que le piston est entamé par l’aiguille de l’indicateur. Cause: tige trop fine (Diamètre 2,5mm) Solution: Utiliser une tige d’appui sur le piston avec une plus grandesurface(ou utiliser un autre système voir stroboscope).
a droite indicateur d’avance, a gauche piston correcteur d’avance avec au centre la marque laissée par la tige de l’indicateur
Arrêt et impossibilité de redémarrer. Après une série de tests concluants, le moteur ralenti puis cale et ensuite impossible de redémarrer. Après investigation, je ne vois pas de gasoil dans le circuit de retour. Cause: L’orifice calibréen sortie de pompe avant le circuit de retour est bouché. Peut être à cause des débris du piston d’avance ou alors des résidus issus du perçage du trou pour instrumentation de la pression pompe . Solution : Débouchage de l’orifice, nettoyage des conduites pompe (et bien utiliser des tuyaux transparents pour vérifier le débit en sortie de pompe).
Problèmes d’avance pompe. Malgré une pression interne pompe qui varie correctement (de 4,3 bars à 1800 rpm à 6,8 bars à 4000 rpm), le piston d’avance présente un déplacement relativement faible (2,5 mm à 1800 rpm puis mouvement de 1 mm entre 1800 et 4000 rpm). En utilisant la lampe stroboscopique , j’observe un recul de l’avance à l’injecteur de 4 ° entre 1800 et 4000 rpm. Je disposais d’une 2 ième pompe du même type, après remplacement de la pompe, l’avance à l’injecteur est correcte.
Arrêts brutaux à pleine charge : A analyser (pb d’électrovanne d’arrêt ou turbo ou d’étouffoir)
Vérifications et réglages initiaux
Quantité d’huile
Lors du remplissage, je vérifie la jauge d’huile au maxi avec les données suivantes (données issues du site de Titibati) :
Volume d’huile Total : 4,7 litres
Vidange sans remplacement filtre : 3,5 litres
Vidange avec remplacement filtre : 3,85 litres
Jauge Maxi- Jauge mini : 1,5 litres
Taux de compression
La mesure est effectuée avec un compressiomètre relié aux trous des bougies de chauffe à température ambiante de 15°C.
pressions OK:diesel turbo => taux de compression inférieur aux diesel atmosphériques
Réglage de la pression turbo
A l’aide d’un compresseur + détendeur + manomètre relié à la capsule du wastegate turbo : Réglage de la tige de commande pour avoir un début de déplacement a partie de 1,25 bar relatif (2,25 bar en pression absolue)
Note : Lors des premiers tests, j’avais réglé le turbo trop bas (0,7bars), j’avais 50 cv maxi
Calage initial de la pompe
Comparateur monté sur le piston pompe, je règle la pompe avec une levée initiale de 1,75 mm au point mort haut.
Calcul de l’influence des modifications de réglagepompe
Avant de faire les tests, j’évalue les effets des réglages pompe pour ne pas faire des modifications de réglage inconsidérées et pour comprendre les mesures effectuées.
La pompe est une 067 avec piston de 11 mm (ref exacte : 0 460 414 067 4812995 VE4/11F2000R342 IVECO/RENAULT 8140.07.27xx)
Décalage d’une dent courroie : Le pignon de vilebrequin a 22 dents. Un décalage d’une dent correspond donc à une variation d’avance de 16,3° vilebrequin
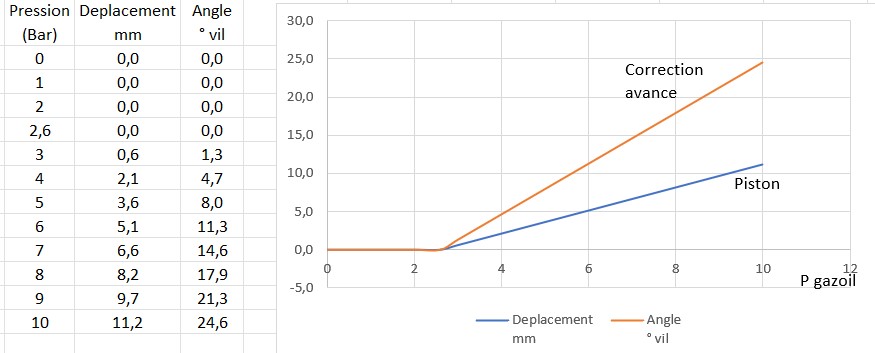
Influence de la pression pompe : En prenant en compte la taille du piston, la raideur du ressort et la longueur du bras de levier du correcteur d’avance, j’ai calculé la correction théorique ci dessous
Influence de la position pompe: Le corps de pompe servant au réglage (trou oblong) a un diamètre de 120 mm. Une variation de 1mm sur cette circonférence correspond à un angle de 0,95° pompe soit 1,9° vilebrequin
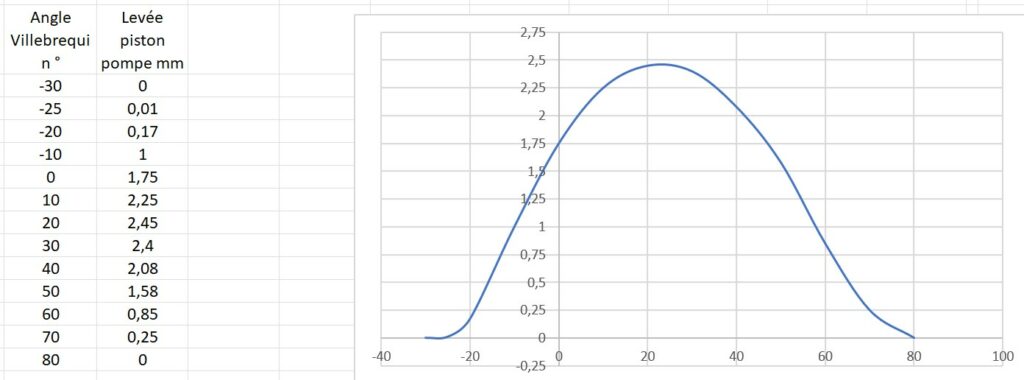
Relation entre levée au PMH et avance :J’ai mis un disque gradué sur la poulie vilebrequin coté pompe et je relève au comparateur la courbe d’évolution de la position du piston d’injection en fonction de l’angle vilebrequin. .On voit qu’aux abords du point de réglage, une modification de l’avance de 2° vilebrequin correspond à une variation de levée au PMH d’environ -0,15mm dans le sens retard et +0,1mm dans le sens avance.
En observant la courbe levée piston en fonction de l’angle on observe un arrondi en début de levée. Avec une levée au PMH a 1,75 mm, l’injection doit commencer après les 25 ° (vers 20° environ)
Instrumentation spécifique
Les mesures sont affichées par l’EMS
Implémentation d’un capteur de position du piston correcteur pour vérifier les variation d’avance (abandonné suite à dégradation du piston par le capteur : ce système est remplacé par le système stroboscope)
Un capteur pour mesurer la pression gasoil dans la pompe à injection est placé sur le raccord de sortie juste avant l’orifice calibré de sortie (ce capteur est relié à la carte EMS en lieu et place du capteur de courant. l’EMS est adapté pour indiquer la pression).
L’injecteur 1 est remplacé par un injecteur pilote pour déclencher un stroboscope qui permet de visualiser l’avance à l’aide d’un disque gradué sur l’arbre moteur. (voir article stroboscope)
Capteur de pression gazoil pompe
Injecteur pilote + carte électronique stroboscope + disque de visualisation
Tests à vide
Test effectués avec un réglage pompe 1,75 au PMH avec la 2 ième pompe à injection (la première pompe présentait un pb sur le correcteur d’avance).
Réglage du régime de ralenti : 1700 rpm
Vérification pression huile (>4 bars), montée en température eau et huile (environ 50°C) réglage vitesse maximale 4200 rpm
Vérification du circuit de gasoil aspiration et refoulement: pas de bulles d’air.
Arrêt moteur vérification de la tension courroie réducteur, vérification de la tension courroie de distribution.
En faisant varier la vitesse je vérifie les valeurs des paramètres.
La pression d’huile augmente très légèrement avec la vitesse et diminue quand la température augmente. (entre 4 et 5 bars: 5 bars à 5°C)
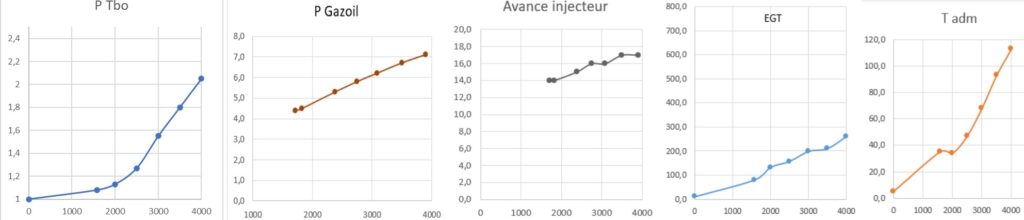
La pression turbo à vide commence à évoluer à partir de 2200 rpm pour atteindre 1bar à 4000rpm. L’intercooler n’étant pas ventilé la température d’admission atteint 120° vers 4000 rpm.
l’EGT reste faible (300 ° maxi): normal car l’EGT est proportionnelle à la puissance.
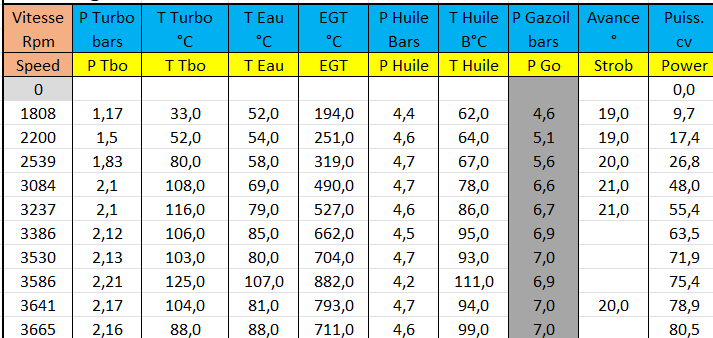
La pression Gasoil varie linéairement de 4,3 à 7 bars de 1800 à 4000 rpm. L’avance à l’injecteur (mesurée au stroboscope) augmente légèrement avec la vitesse (3 ° de variation maxi) : Le correcteur de la nouvelle pompe fonctionne bien, si la correction n’agissait pas on aurait un fort recul de l’angle à haute vitesse.
valeurs a vide
Note sur la mesure stroboscopique et l’avance pompe :
A 2000 rpm, la pression pompe à injection est de 4,8 bar environ donc une correction de +7° (d’après les calculs) soit 27° en sortie pompe (20° au repos +7° de correction).
Les tuyaux d’injection font 45 cm et l’injecteur pilote environ 15 cm soit 60cm au total. La vitesse de propagation de l’onde de gasoil induite par la poussée du piston d’injection est entre 1000 à 1500 m/sec. On a donc un retard de 0,4 ms à 0,6 ms entre la pompe et l’injecteur soit 5° à 7,5° à 2000 rpm. Le stroboscope induit un retard de lecture d’environ 1 à 2°. On devrait lire une avance ente 17,5 et 21° à l’injecteur au lieu des 15° relevés a 2000 rpm. L’écart provient probablement d’une différence de comportement du correcteur d’avance en marchepar rapport aux valeurs statiques (notamment à cause des efforts du piston d’injection pompe sur les cames du système d’avance et aussi aux fluctuations de la pression interne qu’on observe au niveau du piston : en effet, si on met un manomètre en bout de piston correcteur on voit de fortes oscillations de pression).
Tests en charge
Les tests en charge sont effectués avec un barreau de 1210 x 80,7 mm calculé pour une puissance de 90 cv à 3800 rpm.
Test avec intercooler non ventilé
Première série de tests ayant aboutis à 80 CV à 3665 rpm .
Ce résultat doit être amélioré par l’utilisation d’un refroidissement intercooler et ajustement de l’avance.
Intercooler non ventilé, réglage pompe avec a 1,8 mm au PMH. J’ai du ôter la bague qui limite le réglage de butée pleine charge de la pompe pour atteindre la puissance (avant d’ôter la bague, bague en butée j’avais maximum 57 CV). D’autre part, j’ai remarqué qu’il fallait bien faire le plein du bidon de carburant avant chaque test, quand le niveau est proche de zéro, des bulles de gaz peuvent remonter dans la pompe et cela fini par fausser la pression interne donc l’avance donc la puissance délivrée.
Analyse des données
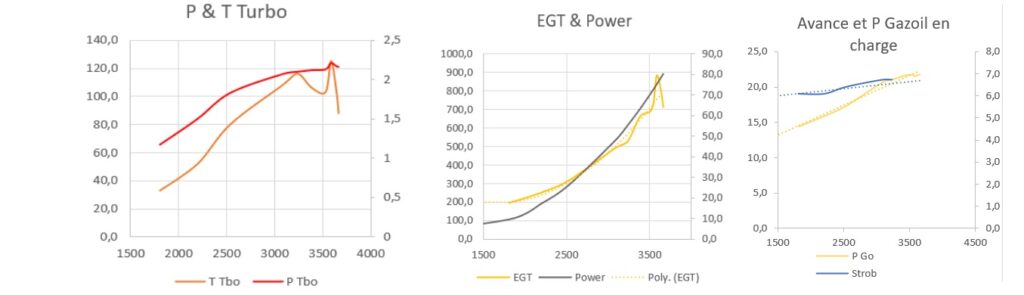
La pression turbo monte rapidement à 1,1 bar (vers 3000 rpm) puis est limitée par le wastegate. La pression gasoil est identique aux essais à vide. L’avance à l’injecteur augmente puis diminue légèrement avec la vitesse mais en moyenne elle est à peu près constante (un peu plus élevée que dans le test à vide précédent car le réglage pompe a plus de levée au PMH pour ce test). L’EGT varie en fonction de la puissance délivrée.
La température air d’admission a une influence importante sur la puissance max délivrée. Lors du test, quand on accélère, la puissance monte rapidement à 80cv (intercooler froid) puis l’intercooler se réchauffant, la température d’admission augmente et la puissance maximale diminue et ça fume un peu plus. Ci-dessus on à 3665 rpm/80 cv avec de l’air à 88 °c (juste après l’accélération) puis (30 sec plus tard) on retombe à 3586 rpm/75 cv avec de l’air à 125°c. (
La température d’eau montant rapidement, les tests doivent être limités en durée, parfois, l’EGT ou la température turbo n’étaient pas stabilisées lors des relevés e qui explique des fluctuations dans les graphiques ci dessous.
Représentation graphique des principaux paramètres
Test finaux avec intercooler ventilé
J’ai refait des tests en mettant un ventilateur sous l’intercooler mais le débit d’air du ventilateur est faible et n’apporte pas un gain très significatif (+1 à 2 CV). Je pense que la puissance pleine charge avec un bon refroidissement intercooler se situera vers 85cv.
La transmission à l’hélice est assurée par un réducteur à courroie fixé et accouplé au bloc moteur par des colonnettes et un accouplement élastique (flector) .
Fabrication des pièces
La plupart des pièces du réducteur (Arbres, platines, roulements et porte roulement, nez de réducteur, poulies, courroie) sont disponibles auprès du CSA (association des constructeurs de Gazaile). J’ai donc acheté le maximum de pièces.
J’ai usiné les pattes de fixation, certaines colonnettes, entretoises et rondelles complémentaires et effectué les perçages et filetages sur les pièces du CSA.
Note : Attention, les trous recevant les vis de fixation du nez dans la platine avant sont en M8 (les vis servent de goujons) ne pas percer à 8 mm. J’ai fait la bêtise et j’ai du fabriquer des insert M8 pour corriger.
Ci dessous les pièces constituants le corps du réducteur et les entretoises de fixation au moteur.
Ci dessous les composants de l’arbre d’hélice (Nez réducteur, arbre, roulements, entretoise entre roulements poulie et clavette)
Ci dessous les composants de l’arbre moteur.
Partie droite on voit l’arbre bas avec un roulement déjà monté. Le porte roulement arrière, la poulie et sa clavette, puis une entretoise, le roulement avant et son porte roulement et enfin la butée de serrage du roulement et la cloche de l’alternateur. La portée cylindrique de l’arbre qui reçoit le flector est moletée pour améliorer la transmission des efforts.
Coté gauche, ce sont des pièces qui ont été fabriquées pour aider l’assemblage soit :
Un faux axe et 2 faux roulements usinés à des diamètres voisins des valeurs réelles et permettant de monter l’ensemble dans le corps du réducteur sans efforts pour vérifier les cotes avant les opérations de montage/frettage.
Une bague guide clavette pour aider la mise en place de la poulie à chaud.
Pré-montage
Le perçage des trous de fixation des platines du réducteur sur le bloc moteur doit être précis pour assurer un bon alignement avec le volant d’inertie et limiter les contraintes sur l’accouplement élastique. J’ai procédé comme suit:
Usinage de vis avec une tête en pointe et usinage d’une pige de centrage
Mise en place des vis sur le bloc et de la pige sur l’axe du volant moteur
Présentation de la platine réducteur sur la pige et marquage de la position des vis (pointage en frappant sur la platine)
Perçage des trous de fixation dans les platines (Les 2 platines sont accolées et centrées l’une par rapport à l’autre en emboitant le support de roulement arrière dans les 2 platines
Après perçage des différents éléments, la structure du réducteur est montée sur le bloc pour vérifier le positionnement et définir la géométrie des pattes de fixation des tirants moteur.
Des modèles sont réalisés dans de la tôle d’aluminium fine et malléable pour obtenir des empreintes qui aideront à la découpe et au pliage
Après traçage et découpe grossière sur de la tôle alu de 5mm, les plaques sont pliées à la presse (avec un rond pour conserver un rayon de courbure de 10 mm) après avoir effectué une trempe fraîche.
Chaque pattes étant constituée de 2 tôles en sandwich, celles ci sont assemblées après pliage et avant la finition des contours et perçages.
Ci-dessous les pattes terminées avec les silentblocs montés.
La patte de fixation coté gauche est fixé avec les vis du U qui à l’origine sont prévus en M6. J’ai repercé à 8 mm et ajouté 2 entretoises de renfort pour utiliser des vis M8 et prévenir des déformations dues aux efforts exercés par les tirants.
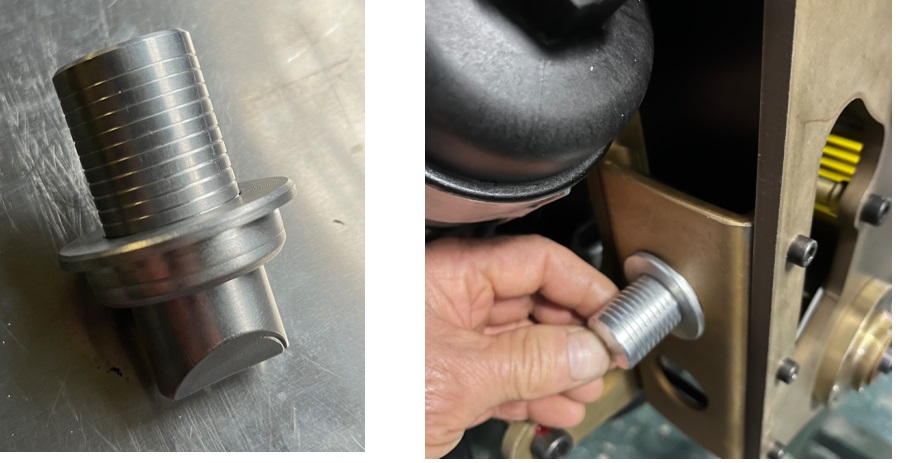
Le moteur étant équipé d’un piège à huile, la vis de la colonnette supérieure doit être noyée dans là platine arrière du réducteur à l’aide d’une vis à tête fraisée. La vis étant inaccessible après montage, j’ai réalisé une colonnette spécifique avec une vis de pression et des méplats pour pouvoir maintenir la vis pendant le serrage de l’écrou.
Les éléments aluminium sont ensuite traités à l’alodine.
Arbre /poulie moteur
Vérifications avant montage
Assemblage du réducteur avec l’arbre bas complet en utilisant les faux roulements et le faux axe pour vérification du jeu entre la poulie basse et les platines (le faux roulement arrière est bloqué sur le porte roulement par une vis de pression intérieure) . Vérification du jeu de serrage de la butée devant le roulement avant.
Le flector étant en place sur le volant moteur : Assemblage du réducteur sur le bloc en utilisant l’arbre bas réel (sans poulie) et les faux roulements . Vérification du bon positionnement des trous du flector en face des filetages de l’arbre moleté.
Montage des composants
Emmanchage du roulement arrière sur l’arbre (à l’aide d’une tige filetée et un manchon de guidage)
Mise en place du porte roulement arrière
Montage de la clavette et montage de la bague de guidage. (Hauteur de clavette préalablement réduite pour conserver un jeu 0,5mm afin de faciliter l’insertion de la poulie à chaud)
Préparation pour frettage de la poulie à chaud (établi près du four, gants et marteau + cales en cas de problème. Repérage du sens de la poulie pour ne pas faire d’erreur.
Frettage de la poulie : Chauffage de la poulie à 250° 1H30, puis insertion sur l’axe. C’est un peu stressant mais en fait ça rentre tout seul.
Montage du roulement avant dans son porte roulement. (Mettre la butée avant dans le porte roulement puis le roulement puis le circlips)
L’arbre bas est alors prêt pour l’assemblage final sur le corps du réducteur.
Arbre hélice
Montage de l’arbre d’hélice sur le nez
Emmanchage du roulement avant (à l’aide d’une tige filetée et un manchon de guidage)
Mise en place de l’entretoise de 125 mm qui sépare les roulements sur l’arbre
Mise en place du nez de réducteur sur le roulement avant (chauffage préalable du nez à 100° pour faciliter son insertion )
Emmanchage du roulement arrière (à l’aide d’une tige filetée et un manchon de guidage) : j’ai du finir l’emmanchage à la presse car les derniers mm étaient très difficiles (le filetage de la tige filetée de 12 mm avait cassé). ATTENTION LORS DE L’UTILISATION DE LA PRESSE A CETTE ETAPE , NE PAS FORCER QUAND LE ROULEMENT ARRIVE EN BUTEE DANS SON LOGEMENT.
Mise en place du circlips
Montage du nez sur la platine avant
Mise en place des vis de maintient du nez de réducteur et collage des vis à l’araldite (Ces vis servent en fait de goujons)
Fixation du nez sur la platine avec des écrous freinés et rondelles
Frettage de la poulie arbre d’hélice
Montage de la clavette (Hauteur de clavette préalablement réduite pour conserver un jeu 0,5mm afin de faciliter l’insertion de la poulie à chaud)
Chauffage de la poulie à 250° 1H30, puis insertion sur l’axe.
CATASTROPHE : L’arbre qui devrait être en retrait de la poulie d’envire 0,5 mm dépasse de 4,5 mm. Cela signifie que lors du travail à la presse, le roulement avant qui doit rester flottant est venu en butée dans la portée en bout de nez. J’ai écrasé l’entretoise inter roulements avec ma presse de 20 tonnes. (A l’origine cette entretoise est fabriquée dans un tube d’aluminium pas très épais). Il faut corriger le problème car, en l’état, les roulements subiront de fortes contrainte axiales sous l’effet de la dilatation des matériaux.
Démontage et correction du problème
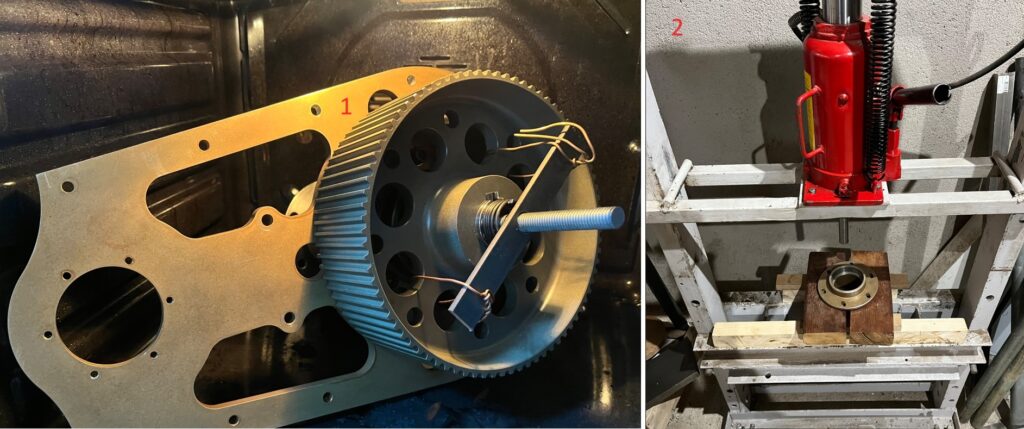
Retrait de la poulie: L’ensemble est chauffé au four à 250 °C. J’ai mis un système de ressort et tirants pour appliquer une force d’extraction de la poulie pendant la chauffe. Cela permet de voir quand c’est suffisamment chaud (la poulie s’extrait toute seule après 45 min au four)
Extraction de l’arbre et des roulements à la presse. J’ai réalisé 2 plaques d’accueil en bois avec des 1/2 trous de 90mm pour ne pas blesser le nez pendant l’extraction.
On constate bien que l’entretoise a perdu 5 mm (120 au lieu de 125 mm)
Usinage d’une nouvelle entretoise plus épaisse (Réalisée en 2 parties de 62,5 mm pour faciliter l’usinage)
Achat de nouveaux roulements (ils ont subit une forte contrainte à la presse et ont été surchauffés au four)
Remontage en évitant d’écraser l’entretoise (cf séquence ci-dessous)
Mise en place de la rondelle et vis de fixation en bout d’arbre.
6 Séquence d’assemblage des roulements arbre hélice
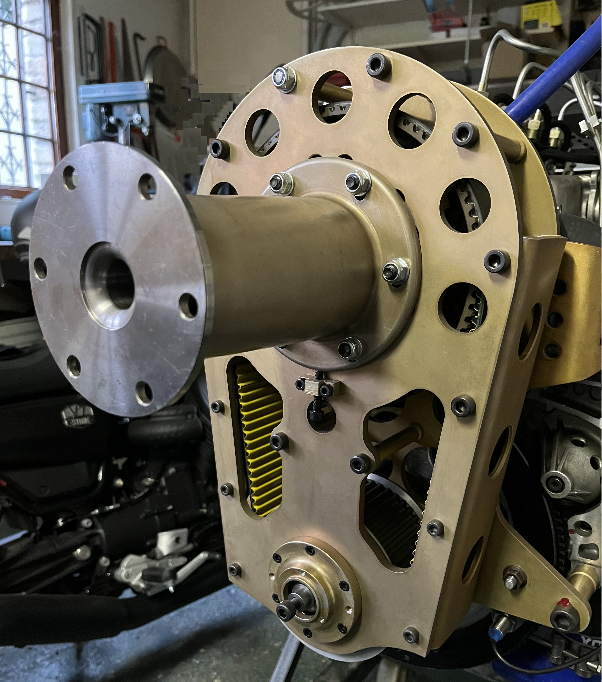
Après remontage, l’arbre haut est prêt pour l’assemblage final
Point positif : Cette erreur m’a permis de constater que le désassemblage des axes n’est pas trop compliqué (si on a une presse) et est réalisable sans dommage, ce qui est rassurant pour les opérations de maintenance futures.
Assemblage et réglage
Assemblage
Montage du flector sur le volant moteur et serrage au couple (70 mN et frein a filet bleu). La longueur des vis a été ajustée avant montage du volant d’inertie pour ne pas dépasser car il y a un risque de détérioration du joint spi sortie moteur.
Montage de la platine arrière du réducteur sur le bloc avec vérification du centrage grâce à une pige emboitée sur l’arbre de sortie du moteur.
Montage de l’arbre bas et fixation du porte roulement arrière sur la platine. Les vis de fixation sont accessibles au travers des trous d’allègement de la poulie du réducteur.
Le nez de réducteur étant en position basse, mise en place de la courroie de transmission sur la poulie haute
Insertion de la courroie sur la poulie basse et assemblage de la platine avant avec les colonnettes et U. Les vis sont ajustées en longueur pour limiter le cumul de petits surpoids. Les écrous sont de type freiné avec rondelle d’appui.
Mise en place des pattes de tirants.
Insertion de la cale entre poulie basse et roulement avant
Montage du porte roulement avant de l’arbre bas.
Serrage final des vis du réducteur
Utilisation d’une entretoise et d’une rondelle temporaires et serrage de l’arbre bas en attendant l’assemblage de l’alternateur
Vérification de la libre rotation du réducteur
Vérification du positionnement des trous du flector par rapport aux trous du moyeu moleté de l’arbre réducteur.
Mise en place des vis du flector sur l’arbre réducteur et serrage au couple (70 mN et frein a filet bleu). La longueur des vis a été ajustée avant pour s’assurer que la prise de filet soit maximale mais que le bout des vis ne touche pas le fond des trous filetés.
Réglage
J’ai réalisé un outil de contrôle de la tension courroie (manchon au diamètre des trous d’allègement U réducteur avec un axe de diamètre 25 mm coulissant gradué tous les 2,5 mm) qui se place dans le trou d’allègement du U de réducteur coté droit (à mi hauteur de la courroie). Le réglage est fait pour obtenir un débattement d’un cm en quand on appuie fermement sur l’outil (mais pas trop).
Alternateur
La cloche, le stator et les aimants constituant l’alternateur ainsi que le régulateur de tension proviennent du CSA (association des constructeurs de Gazaile).
Les 10 aimants (Diam 10mm épais 4mm) sont collés dans la cloche avec une colle bi composant en alternant pôles + et pôles – puis noyés dans de la résine chargé au floc. Le moule pour la résine est constitué d’une bande de tôle fine (boite de conserve) recouverte de scotch paraffiné qui vient se coller sur les aimants. La cloche est ensuite équilibrée avec un axe de 8 mm traversant la cloche et test sur 2 plats aluminium horizontaux : ne pas utiliser de réglet métallique car les aimants perturbent le test. L’équilibrage est fait par retrait de résine a l’aide d’une fraise.
Des fils souples sont soudés en sortie du bobinage stator au plus près des bobines puis le stator est imprégné à la résine . Les points de jonction entre cuivre rigide et fils souples son noyé dans la résine.
Le régulateur est positionné sur le U gauche du réducteur, la connexion régulateur alternateur est réalisé par soudure + gaine thermo rétractable. Les fils sont solidarisés par de la gaine et des colliers.
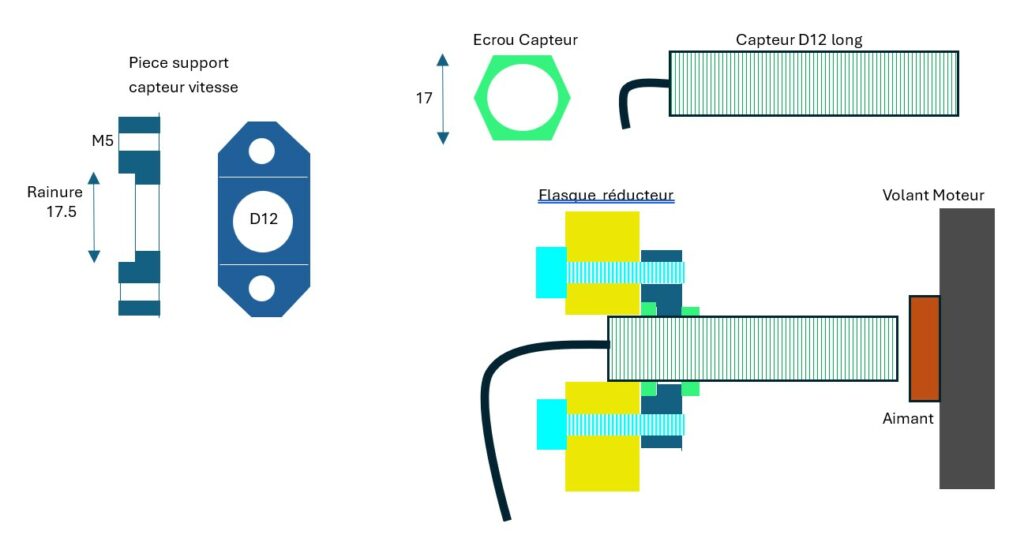
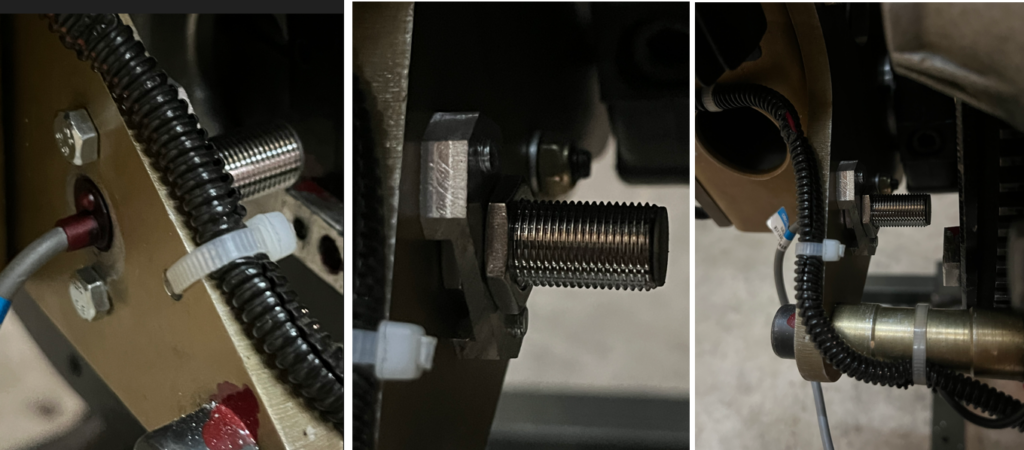
Capteur vitesse
Le capteur vitesse est intégré sur le flasque réducteur face au volant moteur. La distance flasque/volant est un peu trop élevée pour une fixation directe. J’ai fabriqué une pièce en aluminium permettant un montage rigide est bien intégré. Un des écrou du capteur est prisonnier dans la pièce ce qui facilite le serrage.
Essais
Dès les premiers tests de rotation moteur en marche, je constate que la courroie frotte légèrement sur les portées des U réducteur. J’ai du démonter , limer les angles des portées et remonter les U réducteur.
Après correction, plus de souci, la courroie est bien centrée
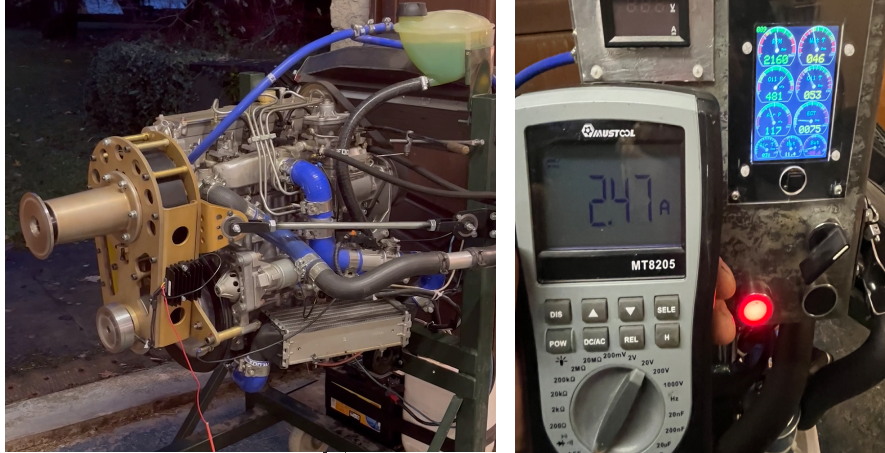
L’alternateur commence a débiter du courant vers 1700 rpm avec 0.7A, le courant passe à 2,5 A à 2160 rpm (sur une batterie faible à 11,8V).
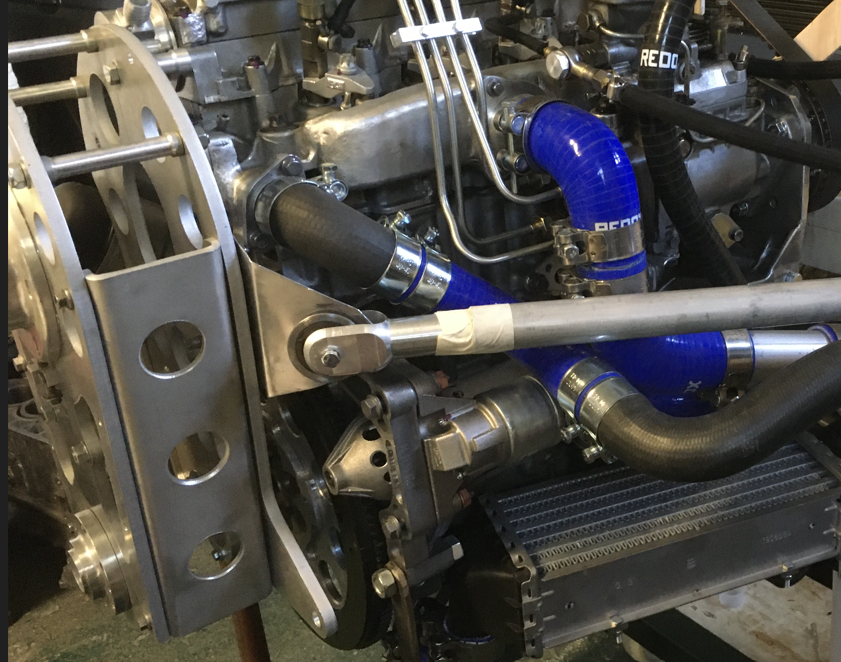
A l’origine, les 2 sorties de l’intercooler sont sur la même face. Une des extrémités a été démontée et retournée pour avoir une sortie par le dessus et une sortie par dessous.
L’intercooler est placé à l’horizontal coté gauche (montage pour les essais moteur avec des fixations en acier vissées sur le bloc moteur) . Le conduit d’admission et dirigé ver les bas au plus court pour laisser de la place aux futurs conduites de refroidissement du radiateur d’eau. 2 coudes silicone à 90° et un coude à 135° sont utilisés.
Refroidissement
Pour les essais moteur, le radiateur est fixé sur un support solidaire du châssis de test dans la même position que celle qu’il aura sur l’avion fini.
La sortie pompe à eau est reliée à un Té alu avant la connexion au radiateur pour la liaison avec le vase d’expansion. Un manchon en alu avec joint torique est placé en entrée pompe à eau . Il est maintenu par une pièce fixée au support de pompe à injection(Cf pompe injection)
Les purges d’air bloc moteur et radiateur sont reliées au sommet du vase d’expansion. Un ventilateur d’extraction est installé sur le radiateur. Un capot bois permet de canaliser l’air dans le ventilateur.
Modifications suite à essais
Suite aux essais en charge, j’ai du procéder à des modifications du circuit :
Le vase d’expansion initial était de très mauvaise qualité: le bouchon ne tenait pas la pression, il a été remplacé par un modèle VW beaucoup plus fiable.
Le circuit d’entrée de la pompe à eau, initialement constitué d’un raccord pompe en alu, d’une durite silicone et un Té alu, présentait une mauvaise tenue sur le raccord pompe. Il a été remplacé par un ensemble soudé en cuivre et laiton. Le circuit cuivre pèse 40 gr de moins que la version alu et on a 2 colliers en moins!
En résumé: Il faut éviter au maximum les durites silicone : c’est très lourd, les colliers sont larges et avec les vis de serrage ils sont encombrants . Ils ne tiennent pas sur un embout cranté. Ils nécessitent impérativement des embouts de connexion longs avec un renflement bien marqué en extrémité de l’embout.
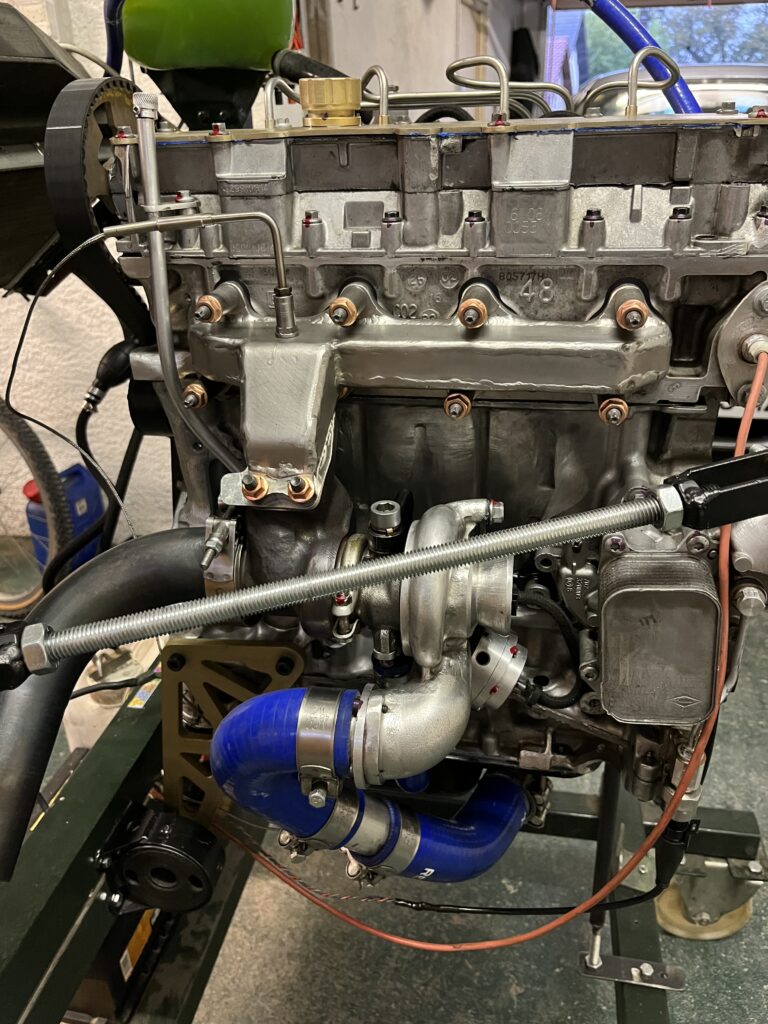
Les transformations sont réalisées en suivant les préconisations de la liasse de Serge Pennec (Adaptations perso, support de turbo, commande de westgate et tuyau huile).
Collecteur / Turbo
Le collecteur en acier a été acheté au CSA. La pièce est de bonne qualité et s’adapte bien sur le bloc. Il faut toutefois ajuster la connexion avec le turbo en faisant des trous oblongs.
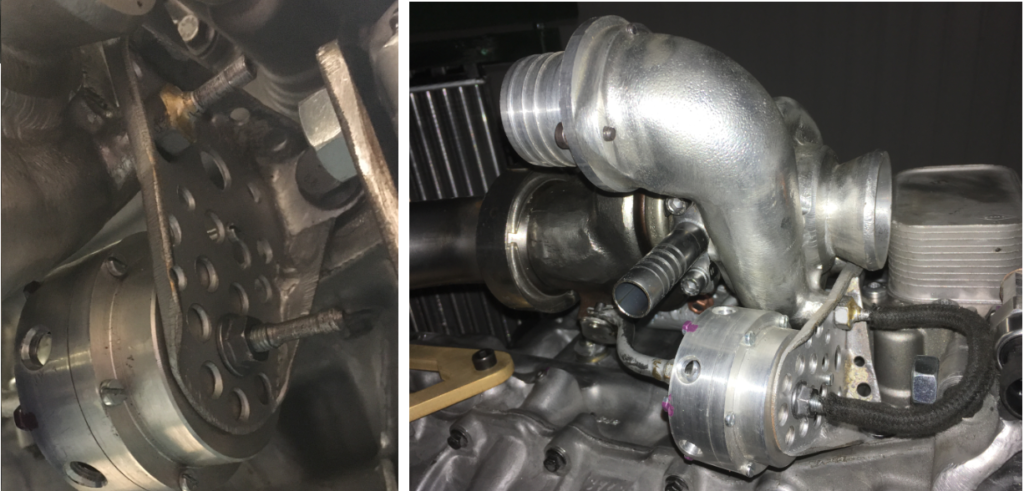
La position de la sortie du collecteur n’étant pas la même que sur celui du DV6, le turbo d’origine a été démonté et modifié. La partie compresseur d’air est modifiée pour avoir la sortie sur le coté. L’ensemble est allégé à la meuleuse et à la fraiseuse sur un plateau tournant.
A gauche collecteur avec turbe, à droite retour huile
Le tuyau d’alimentation en huile d’origine n’étant plus adapté, j’ai fabriqué 2 banjos en acier avec les mêmes dimensions que les banjos d’origine. J’ai formé une tuyau acier (forme en S pour permettre les dilatations) et assemblé le tout par soudo-brasage. Les vis de banjos d’origine sont réutilisées.
Note : Javais essayé de braser les raccords inox d’origine mais je n’ai pas réussi à obtenir un résultat satisfaisant.
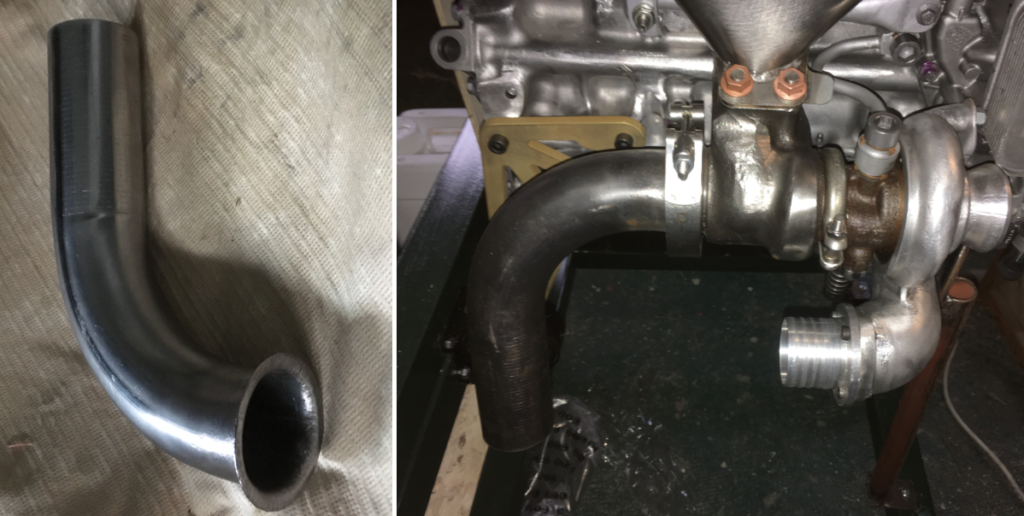
La sortie d’échappement pour les tests sur banc à été fabriquée à partir d’un coude de 2 pouces en acier doux sur lequel j’ai fait une collerette avec un marteau sur une enclume. Cela s’adapte pas trop mal sur le turbo avec un collier en V. Le coude ayant un grand rayon, il ne conviendra pas pour l’implantation finale car le tuyau est trop proche du silentbloc (à raccourcir ou trouver un coude de petit rayon).
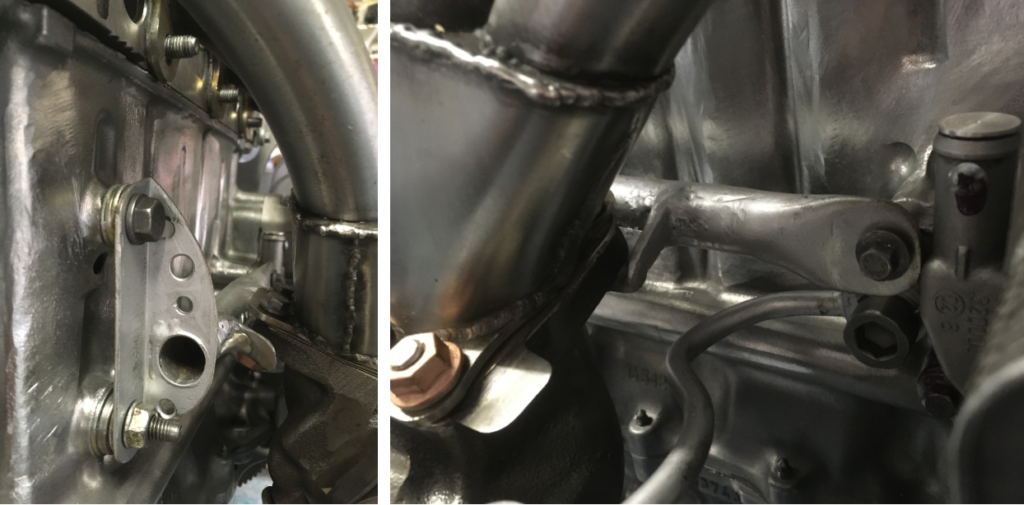
Un renfort, fabriqué à l’aide d’un tube en acier sur lequel est soudée une plaque en U, soutient le turbo. Le tube est aplati et fixé par une vis coté filtre à huile. L’autre extrémité comporte une platine soudée en équerre et fixée au bloc par 2 vis. Pour cette fixation, une vis la été adaptée sur bouchon du conduit d’huile. (Perçage du bouchon, puis introduction d’une vis avec tète coté intérieur et brasage pour l’étanchéité). La plaque en U est percée de 2 trous pour assemblage avec les vis de maintien arrière collecteur/turbo.
A gauche platine, tube et plaque en U fixée au turbo, à droite fixation coté filtreSupport monté vu de dessous
Commande de wastegate
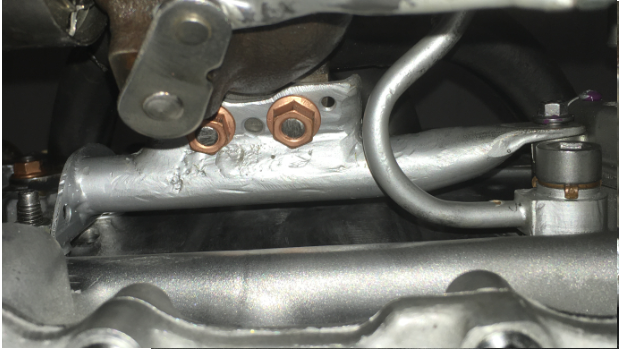
Une platine triangulaire fixée par 2 vis sur la partie compresseur d’air du turbo maintien l’actionneur du wastegate. Cette platine est également fixée sur le bloc moteur, assurant un maintient supplémentaire du turbo. Une des vis coté turbo est percée et terminée par une tétine pour la prise de pression.
La commande de westgate étant inversée, j’ai récupéré le ressort et la membrane et réusiné un corps en aluminium. (Corps en 2 parties assemblées par 6 vis pinçant la membrane et ressort positionné coté tige de commande ). La commande de westgate est fixée sur la platine par une vis centrale (percée et avec une tétine). Une vis complémentaire évite à l’ensemble de tourner dans la platine. Une durite de diamètre 4 mm relie le turbo a l’actionneur.
A gauche platine et fixation sur le bloc, à droite vue de dessous faisant apparaître le retour d’huile, la platine, l’actionneur wastegate avec sa durite et sa tige de commande.
Nouveau collecteur Inox
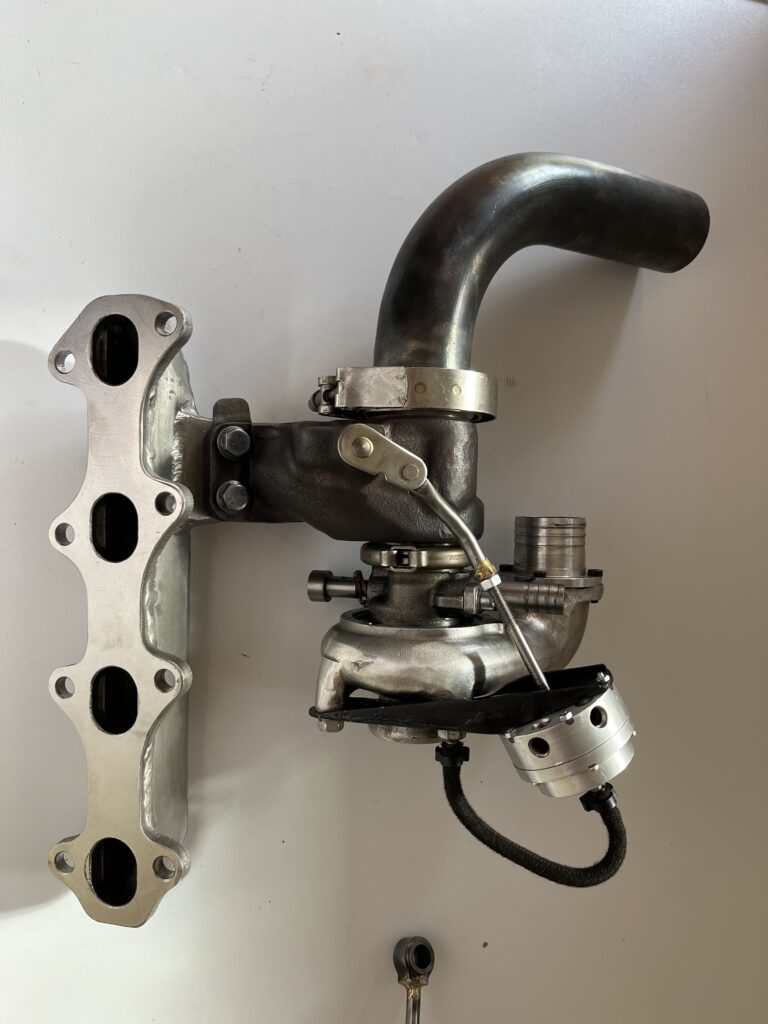
D.Bitz, un des premiers utilisateurs du moteur DV en vol, a constaté que le collecteur en acier monté avec le turbo fixé au bloc subissait des contraintes mécaniques importantes lors des cycles thermiques entrainant une détérioration rapide. Il a développé un collecteur en inox suffisamment rigide pour supporter le turbo. Après validation en vol, il proposé aux constructeurs du gazaile de fabriquer une petite série de ce composant. J’ai donc acheté ce collecteur inox et remplacé le montage initial. Merci à Damien d’avoir partagé son retour d’expérience.
Ci dessous une photo de l’ensemble collecteur turbo avant montage sur le bloc.
J’ai du refabriquer un nouveau support de commande de wastegate , modifier la tige de commande et fabriquer un nouveau tuyau d’alimentation d’huile. J’ai également modifié le tube de jauge d’huile pour contourner le collecteur. Ci dessous le nouvel ensemble installé avec la sonde EGT et le nouveau tube de jauge à huile.
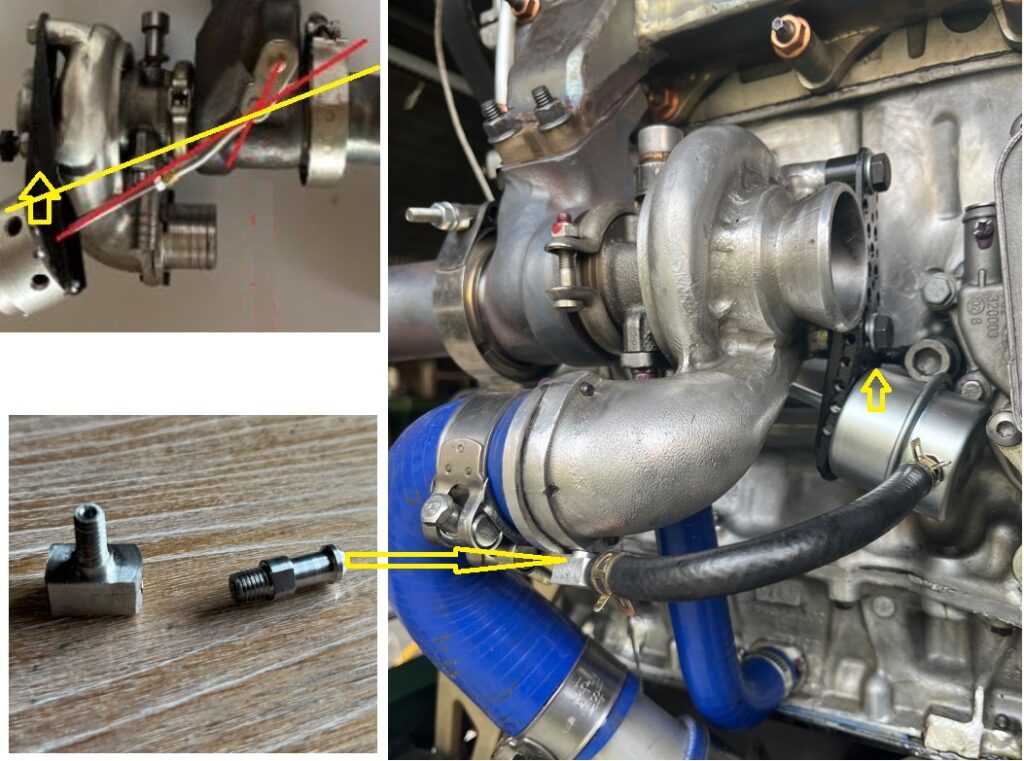
Après essai, il s’avère que la tige de la capsule et le levier de commande du waste gate présente un angle trop ouvert(en rouge ci dessous). L’espace disponible pour la capsule est très réduit : l’échangeur d’huile est proche du turbo, et il ne faut pas que la capsule masque la vis du banjo d’alimentation huile. J’ai acheté une capsule de plus petit diamètre avec connexion sur le coté et modifié la connexion au turbo grâce a une pièce vissée juste avant la durite de sortie d’air. Cela m’a permis, après modification du support, de gagner 1,5 cm en hauteur d’axe (angle en jaune ci dessous).
Les transformations sont réalisées en suivant les préconisations de la liasse de Serge Pennec.
Volant moteur
Afin d’avoir un moment d’inertie maximal avec une masse minimale, le volant moteur d’origine a été usiné pour ne conserver que la couronne périphérique. La partie centrale a été usinée dans une plaque d’aluminium de 15 mm.
Les 2 parties sont assemblées par 12 vis. Un aimant est fixé sur la couronne pour activer le capteur inductif du compte tour. L’ensemble a été équilibré avec un moyeu de test sur des réglets. (J’ai utilisé des petits aimants pour trouver la position de la masse d’équilibrage , puis j’ai usiné une pièce à visser sur la couronne)
A gauche vue coté moteur, à droite vue coté réducteur après montage.
Note : Pour la mise en place de la courroie de distribution, j’ai fabriqué une pièce de blocage volant visible sur la photo de droite
Suite aux premiers essais moteur avec un barreau fixé directement sur le volant et un serrage insuffisant les filetages destinés à la fixation du flector ont été endommagés. J’ai fabriqué des inserts en acier avec des têtes hexagonales et je les ai emboutis dans des lamages coté arrière du volant.
Le démarreur a été démonté et allégé par perçage des zones inactives de la carcasse et du bloc aluminium. (léger gain de poids)
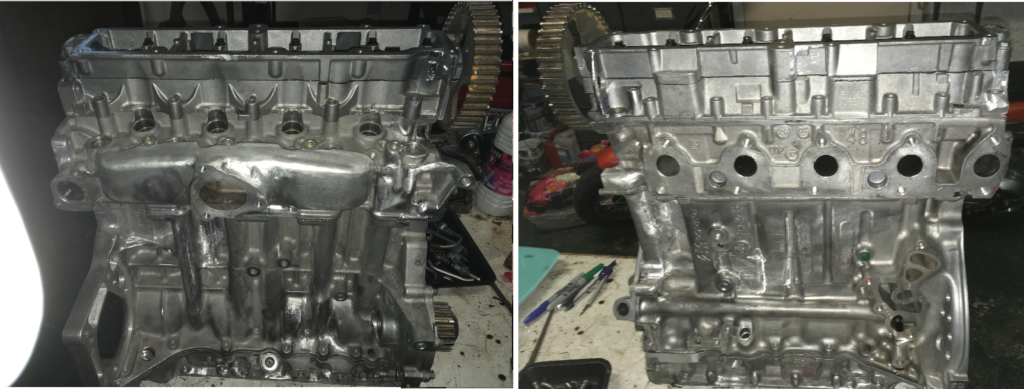
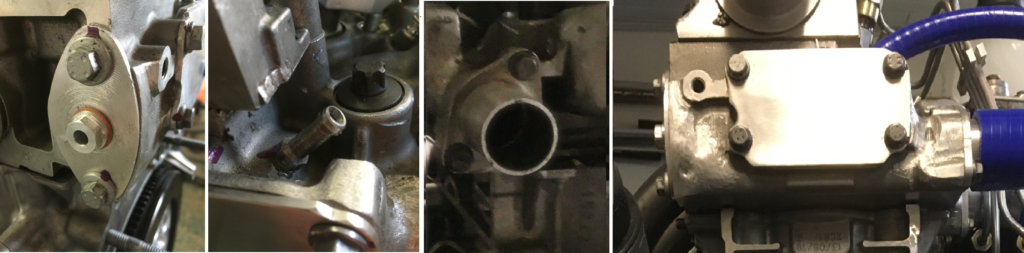
Bloc et culasse
Le bloc moteur et la culasse ont été allégés à la scie à ruban, à la meuleuse 125 mm et avec une meuleuse pneumatique et fraises à rogner (type fraise lime à bois ).
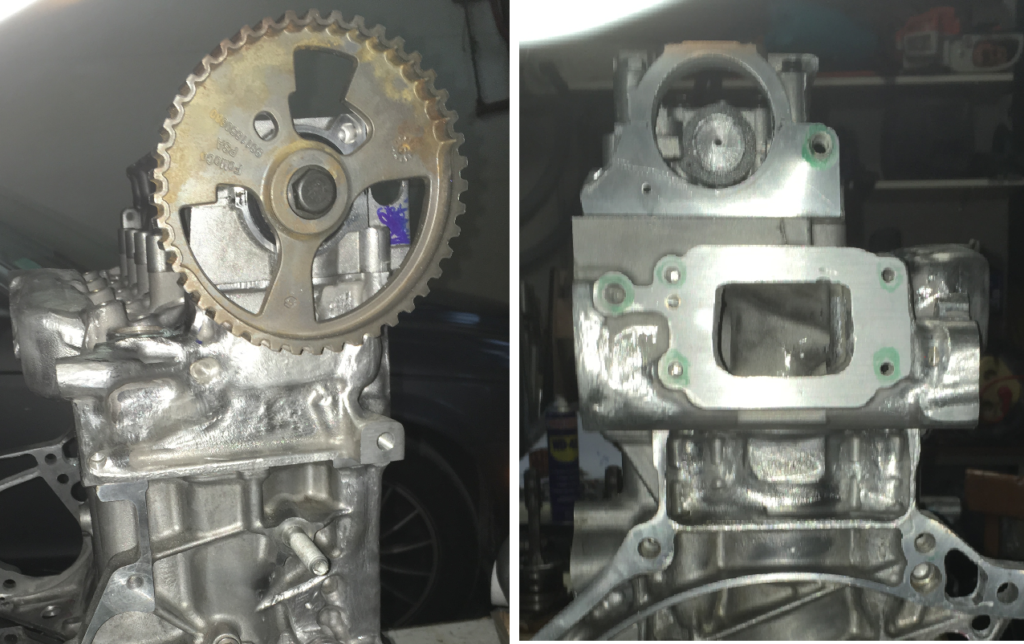
La culasse et le bloc supérieur qui porte l’arbre à cames ont été démontés pour l’opération d’allègement.
A gauche coté distribution, à droite coté pompe à vide
Une plaque de 3 mm ferme la boite à eau.
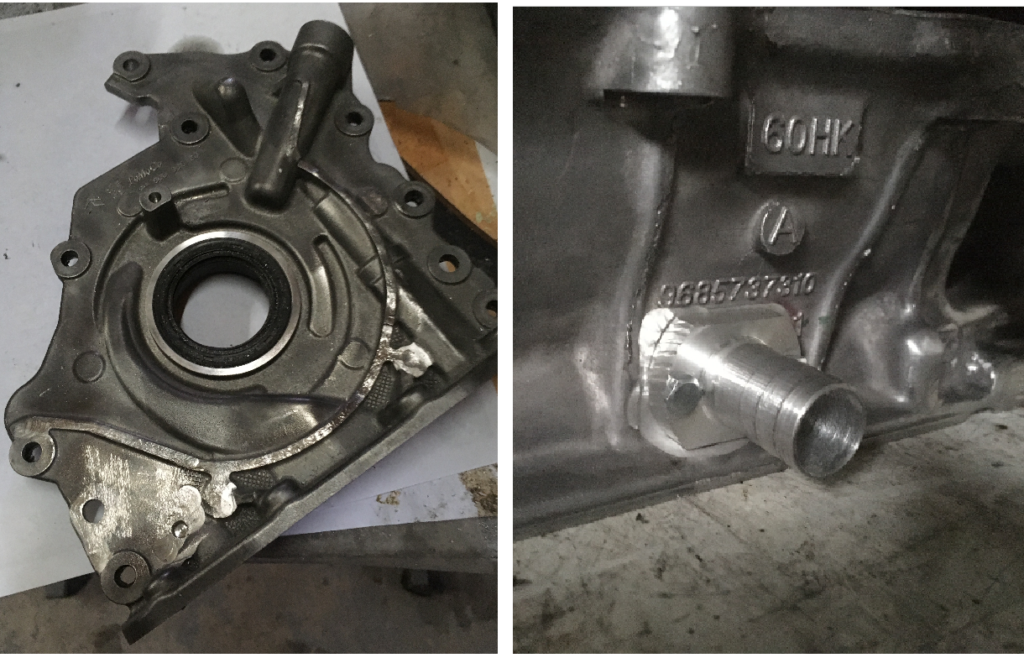
La pompe à huile à également été allégée.
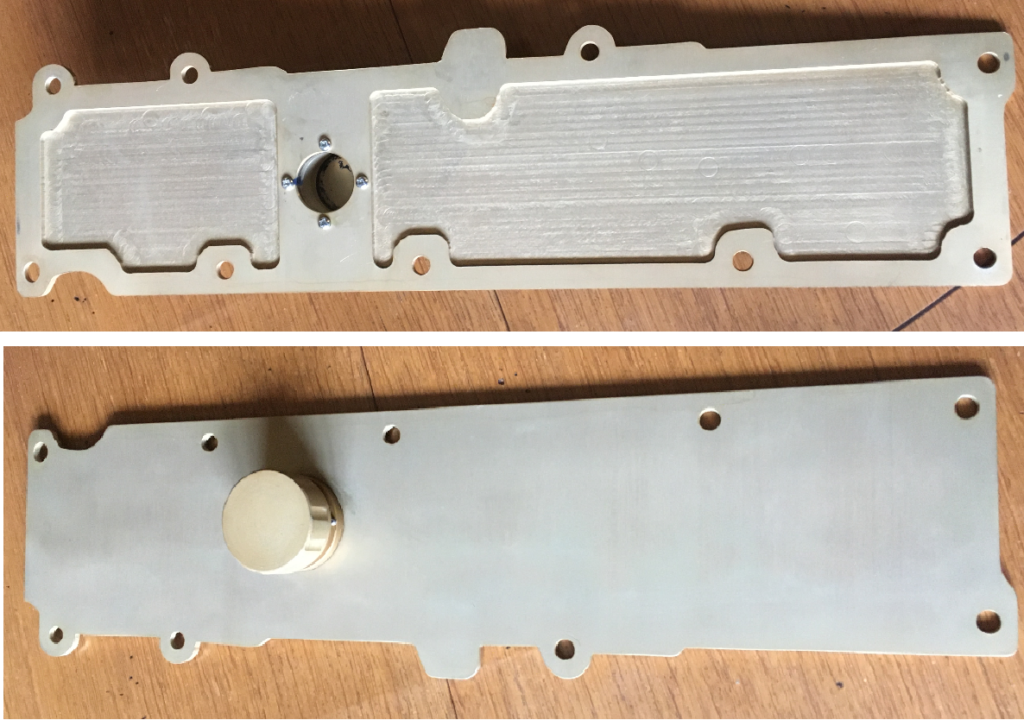
Cache culbuteur
Le cache culbuteur est usiné dans une plaque d’aluminium de 3 mm. La plaque est affinée à la fraiseuse dans les parties centrales. Un bouchon en aluminium diamètre 1 pouce est fixé par 4 vis collées. Le bouchon a été acheté sur ebay puis repris au tour pour allègement. L’ensemble est traité à l’alodine.
Les transformations sont réalisées en suivant les préconisations de la liasse de Serge Pennec . Les seuls points avec adaptations personnelles sont : Le support de pompe avec 3 points d’encrage, le verrouillage de la sortie pompe à eau et l’outil pour cintrer.
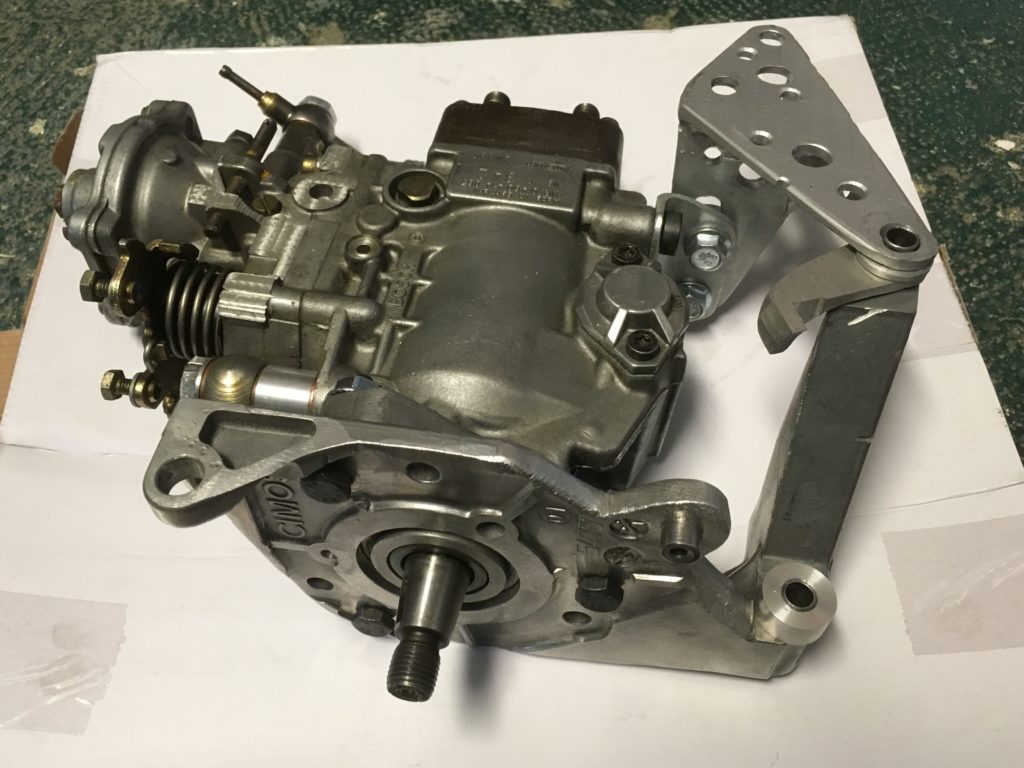
Pompe à injection
La pompe mécanique a été allégée à la fraiseuse.
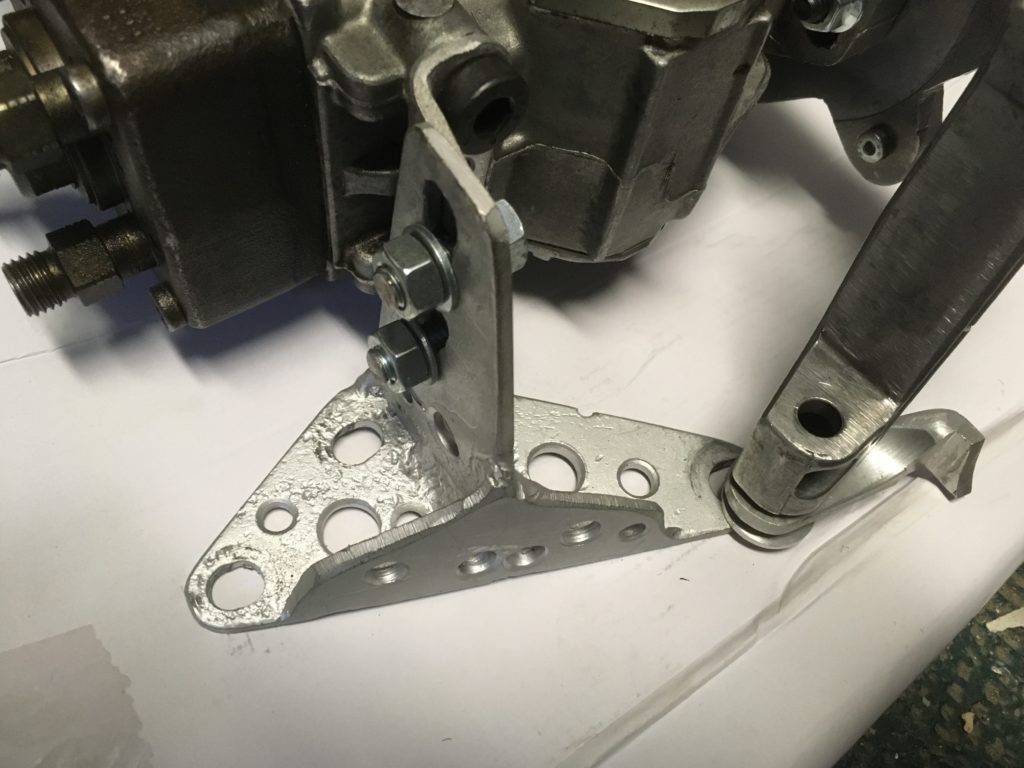
Un support en tôle d’acier de 3 mm avec 3 points de fixation sur le bloc moteur et une équerre avec des trous oblongs consolide la fixation de la pompe tout en permettant le réglage de l’avance.
L’entretoise inférieure est prolongée par une pièce permettant de verrouiller le raccord d’entrée de la pompe à eau.
Les banjos d’alimentation et de retour carburant ont été allégés et les vis ont été usinées en aluminium. La vis du banjo d’alimentation est allongée et une entretoise en aluminium permet la connexion du tuyau par l’avant de la pompe.
Note : l’orifice calibré de retour de gazoil de la pompe est situé avant la vis de banjo donc pas de problème pour ré-usiner les vis.
Le circuit d’alimentation pour le banc de test comporte une poire d’amorçage et d’une filtre à gasoil . Les conduites du bidon servant de réservoir son fabriquées avec des tuyaux aluminium de 8 mm guidés dans un barreau aluminium avec des vis de réglage de la hauteur.
à gauche détail du banjo d’entré, à droite circuit d’alimentation
Injecteurs et conduites
Les injecteurs sont montés avec des joints cuivre de 3 mm . Des bagues en aluminium assurent le guidage dans les bagues plastique d’origine.
Les brides de fixation ont été adaptées
Note : Avec les brides et butées d’origine la mise en place des vis de banjos de retour des injecteurs est limite : dans mon cas cela passe tout juste. (Un léger raccourcissement des butées cylindriques améliorerait la facilité de montage).
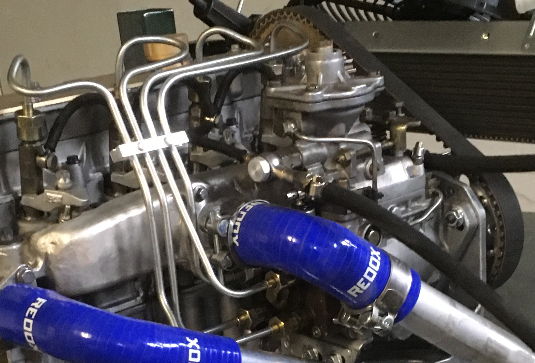
Les conduites d’injecteurs ont été formées à froid à l’aide d’un outil fait maison. Une bride en aluminium maintien les tuyaux (barreau alu de 15 x 10 percé de 4 trous, refendu à la scie puis ré-assemblé par 2 vis) .
Note : l’outil ci-dessous qui a servi pour le cintrage est très pratique car il permet non seulement de cintrer mais aussi de maintenir les tuyaux sans les blesser pendant le formage. En changeant les galets il se transforme en cintreuse à fer plat .
Poulies et courroie
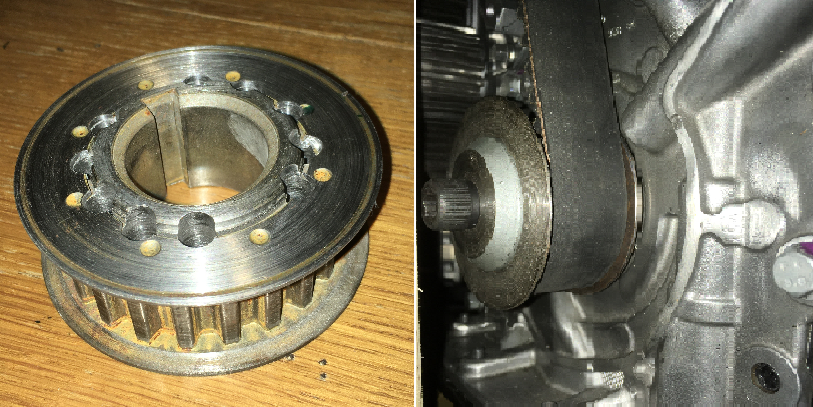
La poulie de pompe est construite à l’aide d’ un moyeu, d’un flasque aluminium et d’ une poulie d’arbre à came .
La pompe disposant de trous oblongs pour le réglage de l’avance, l’assemblage coté poulie est fixe.
La poulie de vilebrequin est allégée. L’arbre de vilebrequin a été raccourci. La rondelle d’appui modifiée et la vis de fixation remplacée par un modèle plus court.
Le système présenté ci dessous est la première version d’EMS réalisé pour les tests moteurs. Il est parfaitement fonctionnel mais l’écran utilisé n’a pas une très haute luminosité et donc difficile à lire au soleil. J’ai conçu une version plus élaborée avec un écran Riverdi 1000 nits et intégrant des données de vol (vitesse air, altitude, bille, GPS). Voir la section EMS EFIS JJR sur ce site.
Présentation EMS basique
Le petit EMS peut être réalisé à un cout très bas (environ 50 Euros avec les capteurs, CI et composants).
Il est composé d’un module d’acquisition « Arduino Nano » à placer dans le compartiment moteur et d’un couple « Arduino Mega » / afficheur TFT de 3.5″, le tout dialoguant par une liaison série.
L’image ci dessous montre le prototype réalisé par câblage soudé sur des plaques de test. L’unité d’acquisition est implantée sur un circuit imprimé après validation lors des essais moteur.
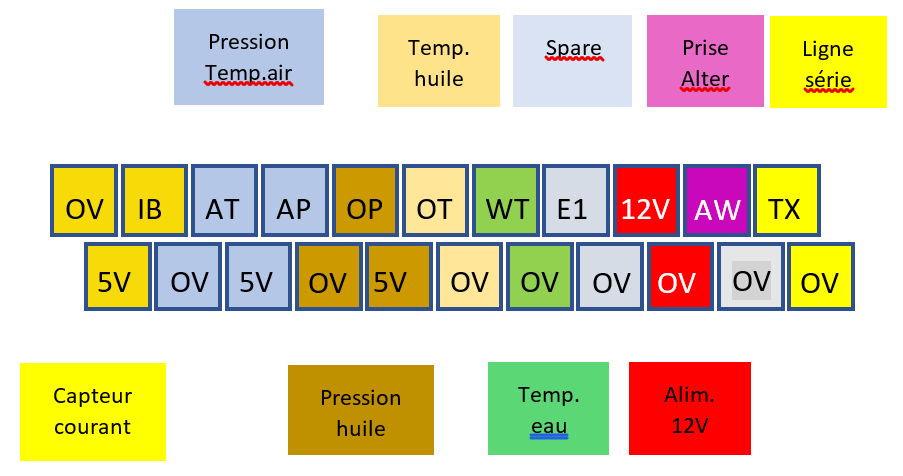
Liste des mesures et capteurs associés
Nouvelle liste de capteurs suite aux premiers essais moteur ; abandon des capteurs TMP36GZ pour l’huile et l’eu et utilisation se sondes NTC 10k
Tension Batterie : Mesure par pont diviseur de tension)
Courant Batterie : Mesure non intrusive par capteur à effet Hall +/-30 A WCS1800
EGT : Thermocouple K + module MAX6675 interface SPI
Température Eau : Sonde NTC 10 K silicone diamètre 6mm
Température Huile : Sonde NTC 10 K silicone diamètre 6mm
Température compartiment Moteur : TMP36GZ (soudé sur le circuit d’acquisition)
Température Air admission : Capteur Peugeot d’origine : NTC (28 kOhms à 0°C / 876 Ohms à 100°C)
Pression Huile : Capteur 1/4 NPT, 0/100 PSI, 0.5/4.5 V
Régime Moteur : Prise W tension alternateur
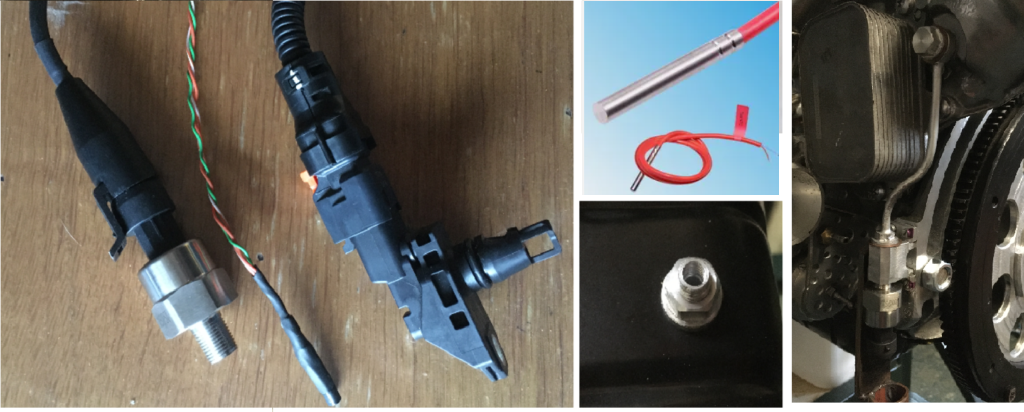
Ci dessous les capteurs utilisés. (De gauche à droite : pression huile, température eau ou huile, pression + température air admission)
Les sondes de température eau / huile , Sonde NTC 10 K silicone diamètre 6mm , sont placées dans des doigts de gant en aluminium (Photo en bas au centre)
Le capteur de pression d’huile est placé dans la partie basse du moteur sur une platine en aluminium. Il est relié au circuit d’huile par l’intermédiaire d’un tube de petit diamètre pour limiter les échanges thermique et diminuer la température de fonctionnement. (Photo de droite)
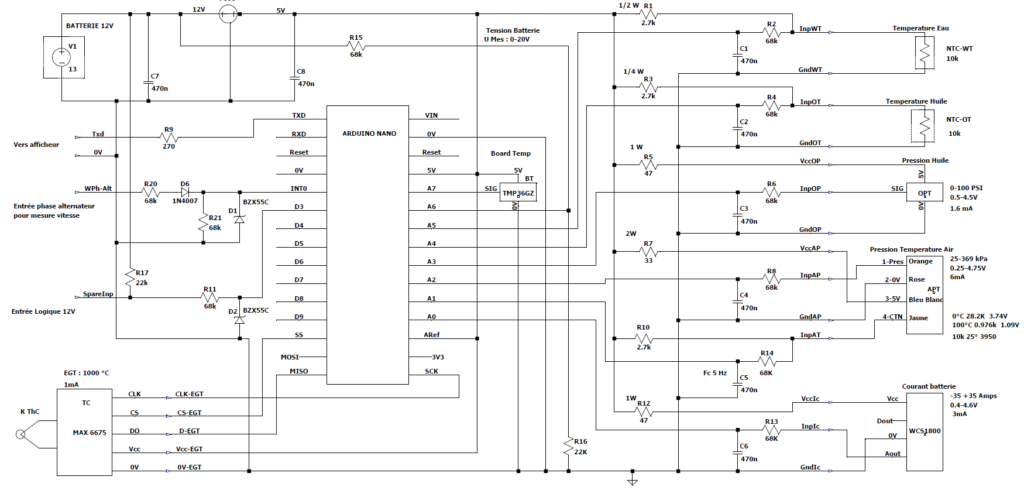
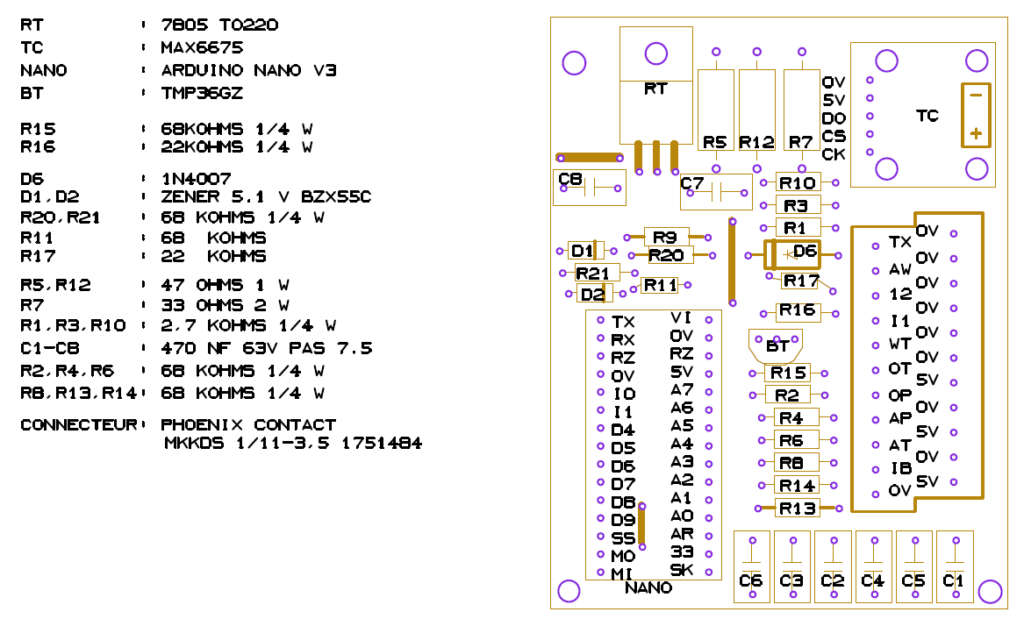
Schéma de l’unité d’acquisition
Nouveau schéma suite aux premiers essais moteur: (Modification des valeurs des résistances des filtres RC et utilisation de sondes NTC pour l’eau et l’huile). Le circuit a été validé sauf l’acquisition de vitesse à partir d’une phase de l’alternateur car celui ci n’est pas encore monté. L’acquisition vitesse est faite par un capteur à effet hall pour l’instant
Bien que l’ « Arduino Nano » possède un régulateur 5V intégré la tension 12V est abaissée par un régulateur 7805 en boitier TO-220 pour permettre une meilleure tenue en température.
Chaque capteur externe nécessitant une alimentation 5V est relié par une résistance de limitation afin d’éviter une perte totale de l’unité d’acquisition en cas de court circuit d’un capteur.
Les mesures analogiques (A0 à A7) sont filtrées par un circuit RC.
La varistance de mesure de la température d’admission est alimentée par un pont diviseur de tension (R10, R14) présentant une résistance équivalente de 2.6 kOhms. Cela donne une tension au borne du capteur à peu près linéaire (linéarité +/-4 ° entre 0 et 110 °C)
Même principe pour les varistances températures huile et eau.
La tension alternateur pour la mesure de vitesse moteur est redressée en mono-alternance et limitée à 5V par le circuit (D1, D6, R20, R21). Le signal est câblé sur l’entrée interruption INT0
La sortie Tx0 de l’unité d’acquisition est reliée à l’entrée Rx2 de l’unité d’affichage.
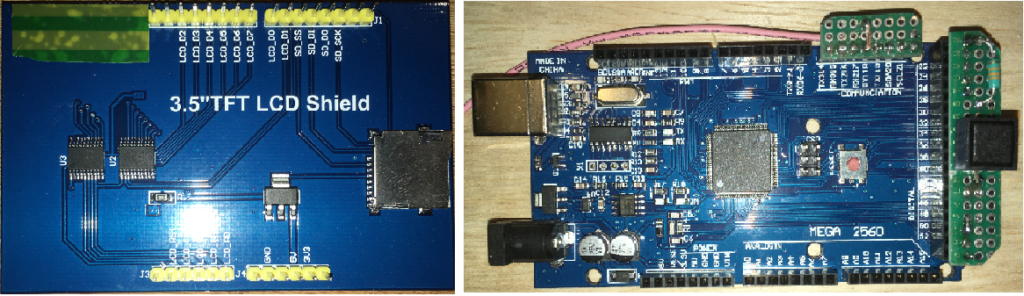
Unité d’affichage
Le module est composé d’un « Arduino mega » sur lequel est enfiché un afficheur TFT 3.5″ (non tactile). Une plaquette à trou, intégrant un bouton poussoir et une résistance reliés à l’entrée D51, est enfichée dans le connecteur inférieur. Ce bouton poussoir est utilisé pour changer de vue.
Un connecteur placé sur le coté permet de relier l’entrée ligne série Rx2 avec le module d’acquisition.
Ci dessous une photo du module TFT vue de dessous et de l’arduino Mega.
Fonctionnement
Acquisition des données
L’unité d’acquisition envoie toutes les 500ms un message avec les valeurs codées en ASCII sous forme d’entiers de 5 digits et séparés par un espace. La première donnée du message est un compteur incrémenté à chaque cycle. Les valeurs nécessitant des décimales sont transmises par multiple de 10 (Exemple : 1/10 Ampère pour la mesure de courant). La longueur totale du message est de 66 octets (Compteur + 10 mesures). Ce format permet de lire en clair les données transmises à l’aide du moniteur série de la console de développement « Arduino ».
Chaque mesure est définie dans l’unité d’acquisition par:
Des coefficients de mise à l’échelle a, b (Mesure=a.NbPoints+b)
Un coefficient de filtrage (Filt )
Une bande morte (DeadB)
Un système anti-bagotement évite des rafraîchissements intempestifs des afficheurs. ( Filtre du premier ordre puis envoi d’une nouvelle valeur si la variation par rapport à la dernière valeur envoyée est supérieure à la bande morte ou si le dernier envoi date de plus de 5 secondes)
Les tension des entrées de mesure de température par sonde NTC n’étant pas tout à fait proportionnelles aux températures réelles, des tables de correction sont définies dans le code et une interpolation linéaire est effectuée pour obtenir une précision de 1 degré.
Note : La non linéarité est du d’une part a l’utilisation d’un simple pont diviseur et d’autre part a la courbe d’évolution de la résistance des sondes en fonction de la température(cf formule ci dessous: Pour les sondes eau et huile B= 3950, pour la sonde air B=3440 :On a donc 2 tables de correction dans le code.
La mesure vitesse est effectuée par 2 interruptions. Une pour le comptage des impulsions de la broche Int0 et une pour générer un timer à 500mS. Chaque 500 ms , le système mémorise le nb d’impulsions et remet à zéro le compteur. On obtient une précision de 28 rpm. La valeur est arrondie à 10 rpm avant envoi.
Restitution des données
Coté module de visualisation, les mesures possèdent les paramètres suivants:
Nom, Unité
Nombre de digits et nombre de décimal pour l’affichage
Couleur d’affichage à l’état normal (Hors alarme)
Valeur d’échelle Min/Max et nombre de tics pour les jauges
Valeur de seuils d’alarmes (Très Bas, Bas, Haut, Très Haut)
Hystérésis pour les alarmes
Echelle et couleur de visualisation historique
Sur réception de message, le programme calcul l’état des alarmes en fonction des seuils et de l’hystérésis et enregistre chaque donnée pour une visualisation historique. (180 échantillons avec une période 10 secondes soit 1/2 heure)
Seuls les messages de 66 octets sont traités. Le compteur de vie en tête de message est vérifié à chaque cycle de réception et est affiché dans la partie supérieur droite de l’écran.
Gris pas de perte de message
Jaune perte d’un message
Rouge perte de plus de 10 messages
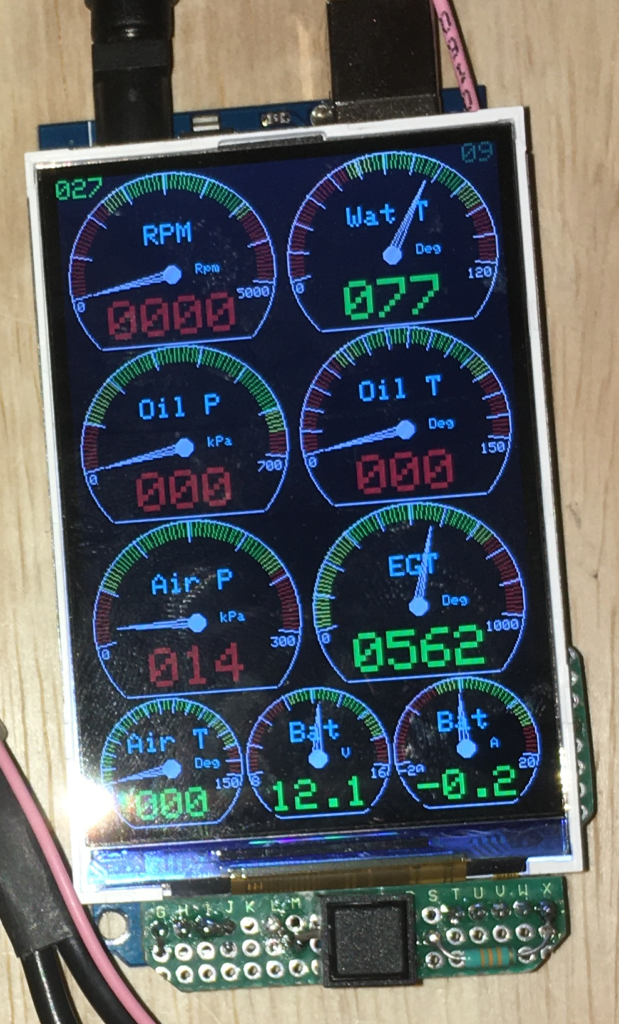
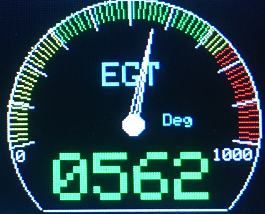
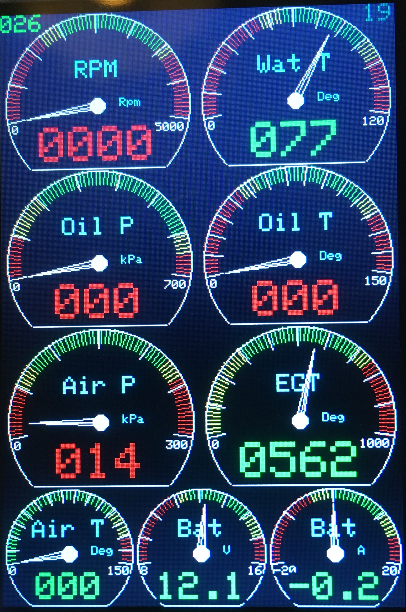
2 types d’afficheurs sont disponibles : Afficheur Numérique simple ou afficheur type Jauge (4 tailles disponibles : Très Grand, Grand, Moyen, Petit). Les jauges ont des secteurs de couleur Rouge /Jaune /Vert /Jaune /Rouge en fonction des seuils d’alarmes. La couleur de la valeur apparaît en Jaune ou Rouge en cas d’alarme.
Il est possible de définir plusieurs vues sur la base des 10 mesures disponibles. Un appui sur le bouton poussoir permet de passer à la vue suivante. Ci dessous une vue avec toutes les mesures affichées sous forme de jauge . (Tailles Moyen et petit)
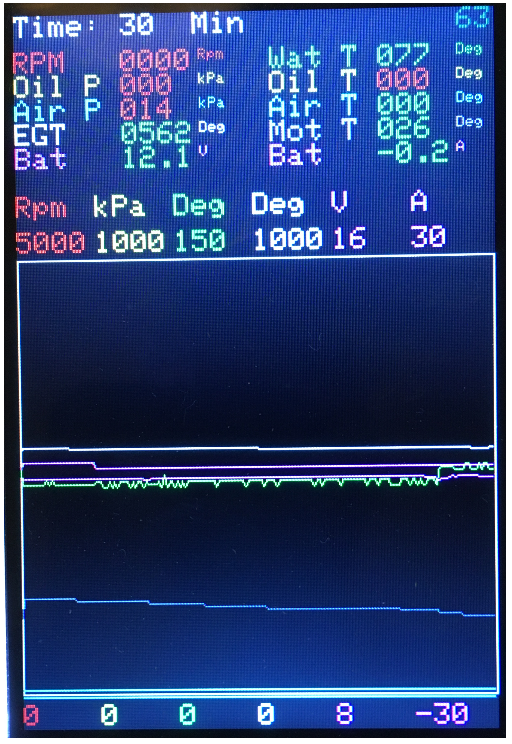
Vue Historique
L’historique des mesures est disponible sous forme de courbes. Une liste d’échelles de visualisation ( numérotées 1 à 6) est prédéfinie dans le code. Chaque mesure est associée à une de ces échelles par codage. Une mesure non associée à une échelle n’est pas visualisée.
Ci dessous la vue historique avec toutes les mesures affichées. Note : La couleur des descriptifs de mesure permet d’associer la mesure aux courbes (Exemple OilP et OilT sont visualisées par des courbes jaunes)
La couleur des valeurs de mesure (Rouge ou jaune ou vert) dépend des seuils d’alarmes
Les échelles ont une couleur spécifique par unité et plage de visualisation
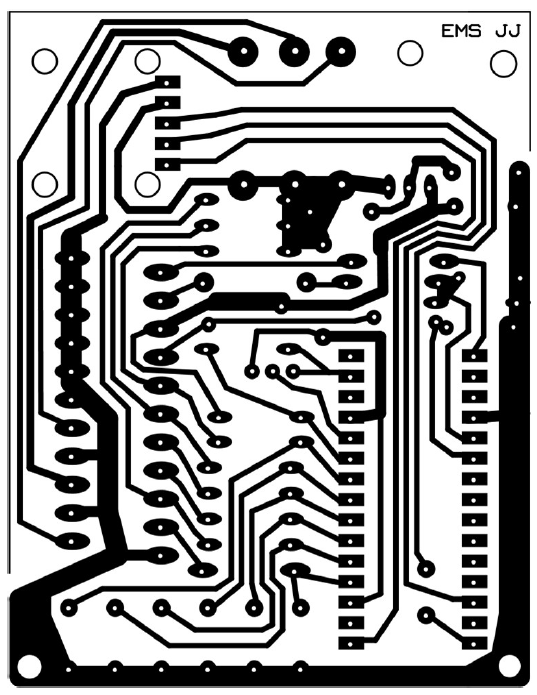
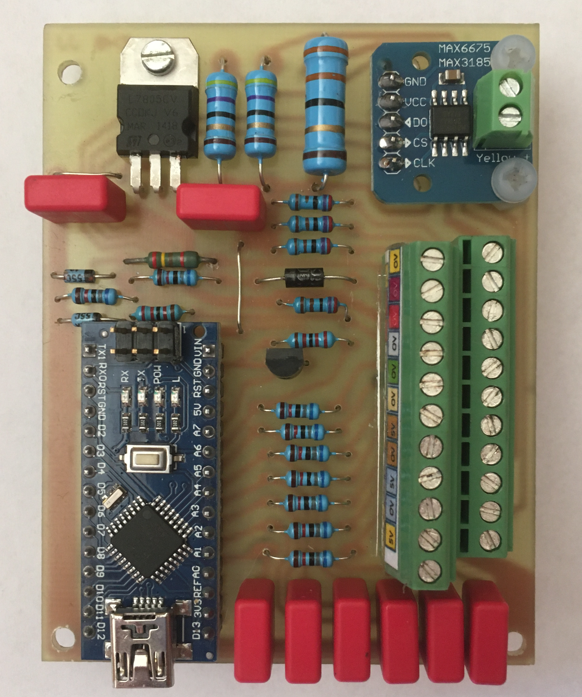
Le prototype a permis de valider le principe mais a présenté une très mauvaise tenue aux vibrations lors des premiers essais moteur. J’ai donc réalisé un circuit imprimé pour avoir un système fiable pour les essais. Le schéma étant relativement simple, le CI est réalisé en simple face. Un bornier Phoenix contact 2 étages est utilisé pour avoir une carte compacte. (65 x 83 mm).